Student projects
We regularly offer student projects based on the research topics of the group, usually in the form of Master Theses and Semester Projects. Interested candidates should send their CV and transcripts (BSc and MSc) to the contacts of the relevant project. Spontaneous applications for topics not listed here are welcome and will be discussed case-by-case.
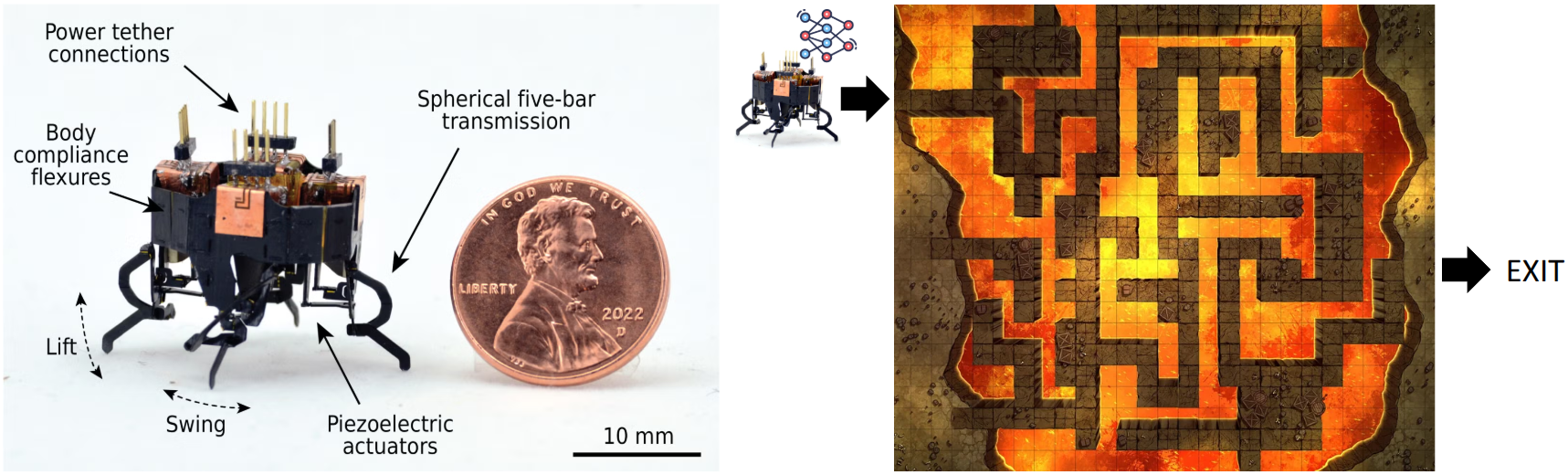
AI-based Maze Escape with an Insect-sized Autonomous Robot
Autonomous insect-scale robots, such as mCLARI, hold great potential for navigating and interacting within constrained, cluttered, and hazardous environments, such as collapsed structures, narrow pipelines, radioactive sites, and disaster areas—environments inaccessible to larger robots and unsafe for humans. However, achieving robust autonomous onboard intelligence at insect scales (sub-5 grams, sub-100 milliwatts) remains an unsolved challenge, as their form factor heavily restricts the resources available onboard, including memory, computation, and sensors. Leveraging advances in ultra-low-power hardware architectures and highly optimized TinyML algorithms, this thesis aims to take the first steps toward enabling AI-driven perception capabilities aboard insect-scale robotic platforms. Specifically, the project focuses on developing an autonomous visual navigation pipeline for insect-scale legged robots, using the IsaacLab simulator. The robot will be tasked with navigating a maze while avoiding collisions with walls.
Contacts: Lorenzo Lamberti llamberti@iis.ee.ethz.ch, Elia Cereda elia.cereda@supsi.ch, Daniele Palossi daniele.palossi@supsi.ch.
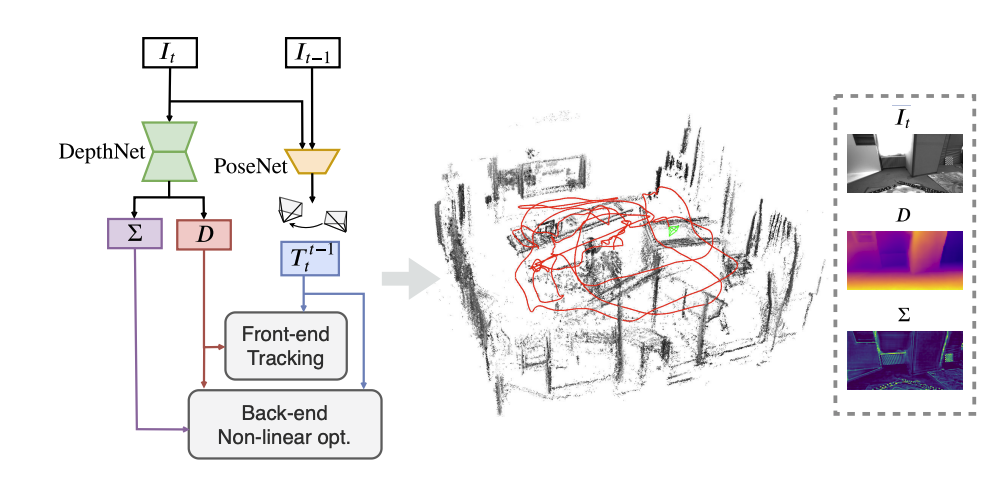
Learning-based Visual Odometry aboard Nano-drones
Any autonomous robots, including palm-sized nano-drones, navigate thanks to the interaction of three fundamental functional blocks. The state estimator determines the current state of the system. Then, what we call the onboard intelligence is responsible for solving the decision-making problem of choosing the next target state. Finally, the control part brings the system from the current state to the target one. This project focuses on the state estimation functionality via visual odometry (VO) algorithms for resource-constrained nano-drones. Traditional pipelines for visual odometry rely on computationally costly feature extraction, matching, and geometric motion estimation stages, making them not yet fully exploitable aboard nano-drones. In this project, the candidate will explore learning-based approaches, e.g., DPVO and DEVO, and work to mitigate these limitations on a visual odometry pipeline, allowing for the in-field evaluation of trade-offs between accuracy and computational cost. The resulting system will be integrated aboard a Crazyflie 2.1 brushless nano-drone, leveraging the GAP9 ultra-low power multi-core System-on-Chip for high-performance parallel onboard computation.
Contacts: Ilenia Carboni ilenia.carboni@supsi.ch, Elia Cereda elia.cereda@supsi.ch, Daniele Palossi daniele.palossi@supsi.ch.

Embedded Learning-based Model Predictive Control on Agile Nano-drones
Agile flight and acrobatic maneuvers on quadrotors deal with hard-to-model dynamics and significant disturbances, while operating at the edge of the physical capabilities of the system. Model Predictive Controllers (MPC) that combine physics- and learning-based dynamic models achieved great success on larger drones, but nano-drones face much tighter power and weight constraints that make these approaches prohibitive. While their sub-10cm and sub-50g form factor constrains onboard computation to just embedded microcontroller units, recent advances have shown MPC is achievable on nano-drones, albeit in ideal circumstances (linear MPC near hover, low speed flight). This thesis aims to relax these constraints, leveraging learning-based dynamics models for the first time on an agile nano-drone. The resulting system will be integrated aboard a Crazyflie 2.1 brushless nano-drone, leveraging the GAP9 ultra-low power multi-core System-on-Chip for high-performance parallel onboard computation.
Contacts: Elia Cereda elia.cereda@supsi.ch, Daniele Palossi daniele.palossi@supsi.ch, Dario Piga dario.piga@supsi.ch.
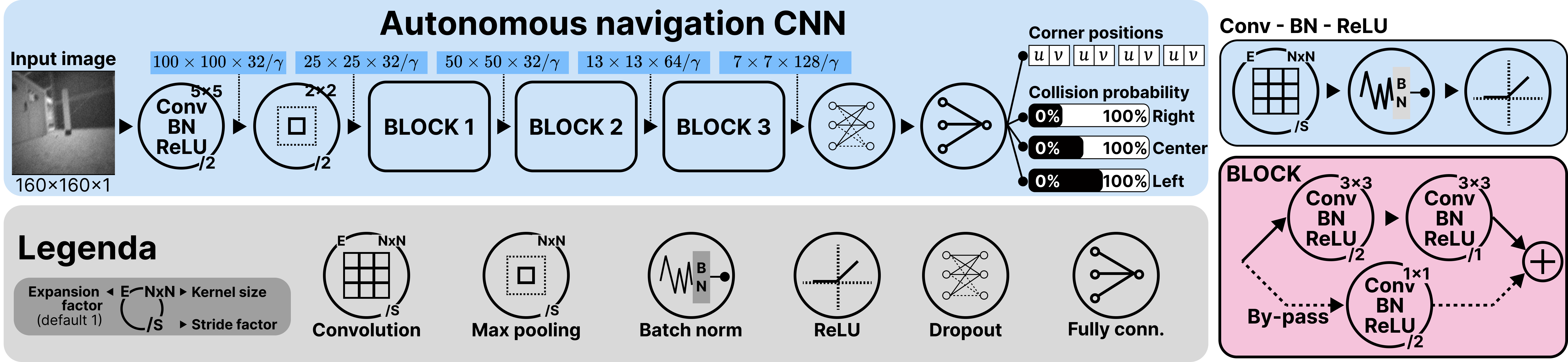
Visual Servoing for Autonomous Nano-drone Racing and Obstacle Avoidance
Palm-sized autonomous nano-drones, i.e., sub-50 g in weight, recently entered the drone racing scenario (Lamberti et al., 2024), (Scarciglia et al.), where they are tasked to avoid obstacles and navigate as fast as possible through gates. However, in contrast with their bigger counterparts, i.e., kg-scale drones, nano-drones expose three orders of magnitude less onboard memory and compute power, demanding more efficient and lightweight vision-based pipelines to win the race.
Recent progress in autonomous nano-drone racing has shown the feasibility of two complementary approaches: i) robust visual obstacle avoidance, where a single convolutional neural network (CNN) predicts collision probabilities across the field of view, and ii) map-free gate detection using a lightweight CNN combined with a visual servoing controller. While both modules have been demonstrated fully onboard with real-world tests, they have so far been evaluated in isolation: the drone was either avoiding obstacles or navigating through gates, not running both CNNs simultaneously.
This thesis aims to advance the state of the art in autonomous nano-drone racing by: i) training new CNN models, leveraging simulated data, to jointly address obstacle avoidance and gate detection, and ii) designing a novel drone state machine capable of dynamically switching between avoidance and gate-navigation modes upon gate detection.
Contacts: Luca Crupi luca.crupi@supsi.ch, Lorenzo Lamberti lorenzo.lamberti@supsi.ch, Daniele Palossi daniele.palossi@supsi.ch.