Learn to reach a pose#
We move to a slightly more complex task: reaching a pose from a random initial pose. This task introduces a success criterion: an agent is successful if it reaches the pose (within some tolerance) before the timeout expires.
We are going to evalutate success, together with reward and episode length, during and after training.
[1]:
import warnings
warnings.filterwarnings("ignore")
The scenario#
We define a scenario where the agent starts randomly and wants to reach the origin.
[2]:
from navground import sim, core
import math
duration = 20.0
time_step = 0.1
scenario = sim.load_scenario("""
bounding_box:
min_x: -5
max_x: 5
min_y: -5
max_y: 5
groups:
-
type: thymio
number: 1
radius: 0.5
control_period: 0.1
color: goldenrod
kinematics:
type: 2WDiff
wheel_axis: 1
max_speed: 1
max_backward_speed: 1
max_forward_speed: 1
position:
sampler: uniform
from: [-5, -5]
to: [5, 5]
# value: [1, 1]
orientation:
sampler: uniform
from: 0
to: 6.28
behavior:
type: Dummy
task:
type: GoToPose
angular_tolerance: 0.25
tolerance: 0.25
orientation: 0
point: [0, 0]
""")
We display the target pose in grey.
As there are no obstacles, the dummy behavior reaches the target pose successfully within the prefixed tolerance of 0.25 meters and 0.25 radians.
[3]:
from navground.sim.ui.to_svg import svg_for_agent
from navground.sim.ui.video import display_video_from_run
def draw_target(world: sim.World) -> str:
r = ''
for agent in world.agents:
if agent.behavior:
target = sim.Agent(radius=agent.radius)
target.type = agent.type
pose = agent.behavior.get_target_pose(core.Frame.absolute, ignore_tolerance=True)
if pose:
target.pose
r += svg_for_agent(target, attributes={'fill': 'grey'})
return r
exp = sim.Experiment(time_step=time_step, steps=200)
exp.scenario = scenario
exp.record_config.pose = True
exp.terminate_when_all_idle_or_stuck = True
display_video_from_run(exp.run_once(seed=4), factor=4, display_width=300,
background_extras=[draw_target])
[3]:
The environment#
We make the agent controls its linear and angular accelerations.
[4]:
from navground.learning import ControlActionConfig
action_config = ControlActionConfig(max_acceleration=1,
max_angular_acceleration=10,
use_acceleration_action=True)
using information about its own velocity and target
[5]:
from navground.learning import DefaultObservationConfig
observation_config = DefaultObservationConfig(
include_velocity=True, include_angular_speed=True,
include_target_direction=True, include_target_distance=True,
include_target_orientation=True)
We assign a reward that promote moving towards the target pose at full speed and then stop when within the tolerance. We also specify how success is defined: the agent should reach the target and have a low enough velocity.
[6]:
import gymnasium as gym
from navground.learning.rewards import TargetEfficacyReward
def is_success(agent: sim.Agent, world: sim.World) -> bool:
return (world.step > 0 and agent.behavior.check_if_target_satisfied() and
agent.behavior.is_stopped(epsilon_speed=0.01, epsilon_angular_speed=0.1))
train_env = gym.make('navground',
scenario=scenario,
action=action_config,
observation=observation_config,
reward=TargetEfficacyReward(),
time_step=time_step,
max_duration=duration,
success_condition=is_success,
terminate_on_success=True,
init_success=False)
It is a good practice to introduce a separate enviroment for testing. In our case, StableBaseline3 requires a vectorized enviroment.
[7]:
from stable_baselines3.common.vec_env import DummyVecEnv
test_venv = DummyVecEnv([
lambda: gym.make('navground',
scenario=scenario,
action=action_config,
observation=observation_config,
reward=TargetEfficacyReward(),
time_step=time_step,
max_duration=duration,
success_condition=is_success,
terminate_on_success=True,
init_success=False) for _ in range(1)])
test_venv.seed(1);
[8]:
from navground.learning.evaluation import evaluate_policy
dummy_policy = train_env.unwrapped.policy
dummy_reward, dummy_reward_std_dev = evaluate_policy(dummy_policy, test_venv, n_eval_episodes=100)
print(f"Dummy reward = {dummy_reward:.2f} ± {dummy_reward_std_dev:.2f}")
Dummy reward = -16.84 ± 4.34
[9]:
from navground.learning.policies.random_predictor import RandomPredictor
random_policy = RandomPredictor(action_space=dummy_policy.action_space,
observation_space=dummy_policy.observation_space)
random_reward, random_reward_std_dev = evaluate_policy(random_policy, test_venv, n_eval_episodes=100)
print(f"Random reward = {random_reward:.2f} ± {random_reward_std_dev:.2f}")
Random reward = -199.94 ± 4.57
Training#
We train a RL policy using StableBaseline3 SAC algorithm.
[10]:
from stable_baselines3 import SAC
sac = SAC("MultiInputPolicy", train_env, verbose=0, policy_kwargs={'net_arch': [32, 32]})
We configure StableBaseline3 logs to save a CSV file.
[11]:
from stable_baselines3.common.logger import configure
from pathlib import Path
from datetime import datetime as dt
stamp = dt.now().strftime("%Y%m%d_%H%M%S")
sac.set_logger(configure(f"logs/Pose/SAC/{stamp}", ["csv"]))
path = Path(sac.logger.get_dir())
path
[11]:
PosixPath('logs/Pose/SAC/20250520_155144')
We add callbacks to perform evaluation using the test enviroment we just created (and automatically export the best model to onnx),
[12]:
from navground.learning.utils.sb3 import callbacks
cbs = callbacks(test_venv, sac.logger.get_dir(), eval_freq=2_000,
number_of_videos=0, export_to_onnx=True)
while we train
[13]:
sac.learn(total_timesteps=40_000, reset_num_timesteps=False, log_interval=30,
callback=cbs)
sac.num_timesteps
[13]:
40000
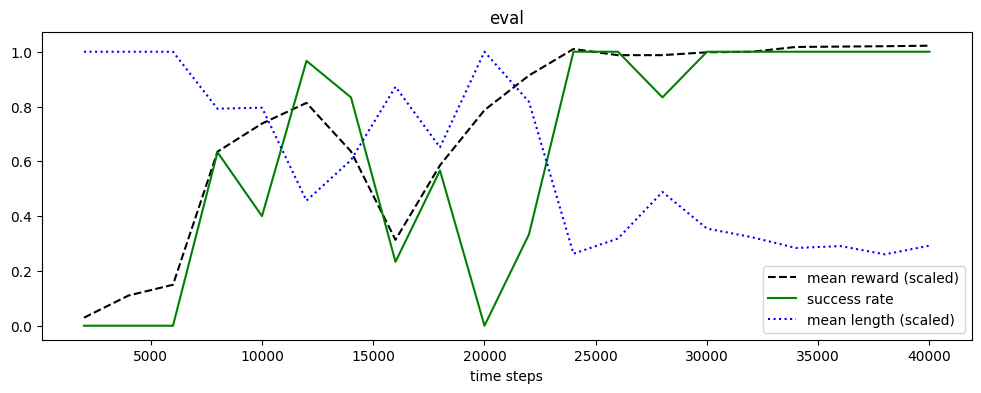
We check the evaluation logs. We see that the policy performs well (i.e., sightly better then Dummy) from about 25K steps.
[ ]:
import pandas as pd
from navground.learning.utils.sb3 import load_eval_logs, plot_eval_logs
pd.set_option("display.precision", 2)
load_eval_logs(path)
| time/total_timesteps | eval/mean_ep_length | eval/mean_reward | eval/success_rate | |
|---|---|---|---|---|
| 0 | 2000 | 200.00 | -194.58 | 0.00 |
| 1 | 4000 | 200.00 | -179.77 | 0.00 |
| 2 | 6000 | 200.00 | -172.55 | 0.00 |
| 4 | 8000 | 158.40 | -83.64 | 0.63 |
| 5 | 10000 | 159.17 | -64.84 | 0.40 |
| 7 | 12000 | 91.27 | -51.03 | 0.97 |
| 9 | 14000 | 120.90 | -83.46 | 0.83 |
| 10 | 16000 | 174.43 | -142.54 | 0.23 |
| 12 | 18000 | 130.23 | -92.74 | 0.57 |
| 13 | 20000 | 200.00 | -55.89 | 0.00 |
| 15 | 22000 | 163.47 | -32.71 | 0.33 |
| 17 | 24000 | 52.57 | -15.01 | 1.00 |
| 19 | 26000 | 63.63 | -19.15 | 1.00 |
| 21 | 28000 | 97.67 | -19.12 | 0.83 |
| 23 | 30000 | 70.90 | -17.21 | 1.00 |
| 25 | 32000 | 64.70 | -16.87 | 1.00 |
| 27 | 34000 | 56.77 | -13.65 | 1.00 |
| 30 | 36000 | 58.13 | -13.40 | 1.00 |
| 32 | 38000 | 52.10 | -13.15 | 1.00 |
| 34 | 40000 | 58.43 | -12.82 | 1.00 |
[15]:
plot_eval_logs(path, success=True, length=True, reward_high=dummy_reward, reward_low=random_reward,
length_high=200, figsize=(12, 4))
Evaluation#
We now evaluate the policy using navground experiments, which allow to record any kind of data, included success, which is not possible using evalutate_policy.
[16]:
from navground.learning.evaluation.experiment import make_experiment_with_env
import numpy as np
exp = make_experiment_with_env(test_venv)
exp.terminate_when_all_idle_or_stuck = True
exp.record_config.pose = True
exp.number_of_runs = 1000
exp.steps = 200
exp.run()
reward = [np.sum(run.records['reward']) for run in exp.runs.values()]
length = [len(run.records['reward']) for run in exp.runs.values()]
# Success is not recorded for the navground policy
success = np.mean([x < 200 for x in length])
df = pd.DataFrame()
df['expert'] = {'success rate': success,
'mean reward': np.mean(reward), 'std dev reward': np.std(reward),
'mean length': np.mean(length), 'std dev length': np.std(length)}
[17]:
exp = make_experiment_with_env(test_venv, policy=random_policy)
exp.terminate_when_all_idle_or_stuck = True
exp.number_of_runs = 100
exp.record_config.pose = True
exp.steps = 200
exp.run()
success = np.mean([np.sum(run.records['success']) for run in exp.runs.values()])
reward = [np.sum(run.records['reward']) for run in exp.runs.values()]
length = [len(run.records['reward']) for run in exp.runs.values()]
df['random'] = {'success rate': success,
'mean reward': np.mean(reward), 'std dev reward': np.std(reward),
'mean length': np.mean(length), 'std dev length': np.std(length)}
[18]:
exp = make_experiment_with_env(test_venv, policy=sac.policy)
exp.terminate_when_all_idle_or_stuck = True
exp.record_config.pose = True
exp.number_of_runs = 1000
exp.steps = 200
exp.run()
success = np.mean([np.sum(run.records['success']) for run in exp.runs.values()])
reward = [np.sum(run.records['reward']) for run in exp.runs.values()]
length = [len(run.records['reward']) for run in exp.runs.values()]
df['SAC'] = {'success rate': success,
'mean reward': np.mean(reward), 'std dev reward': np.std(reward),
'mean length': np.mean(length), 'std dev length': np.std(length)}
[20]:
df.to_csv('Pose/eval.csv')
df.T
[20]:
| success rate | mean reward | std dev reward | mean length | std dev length | |
|---|---|---|---|---|---|
| expert | 1.0 | -13.47 | 4.71 | 56.71 | 15.17 |
| random | -1.0 | -199.67 | 5.47 | 200.00 | 0.00 |
| SAC | 1.0 | -14.23 | 3.60 | 57.12 | 15.39 |
Let us also display the video from a run (same seed as the first video) generate from the trained policy.
[21]:
display_video_from_run(exp.runs[4], factor=4, display_width=300,
background_extras=[draw_target])
[21]:
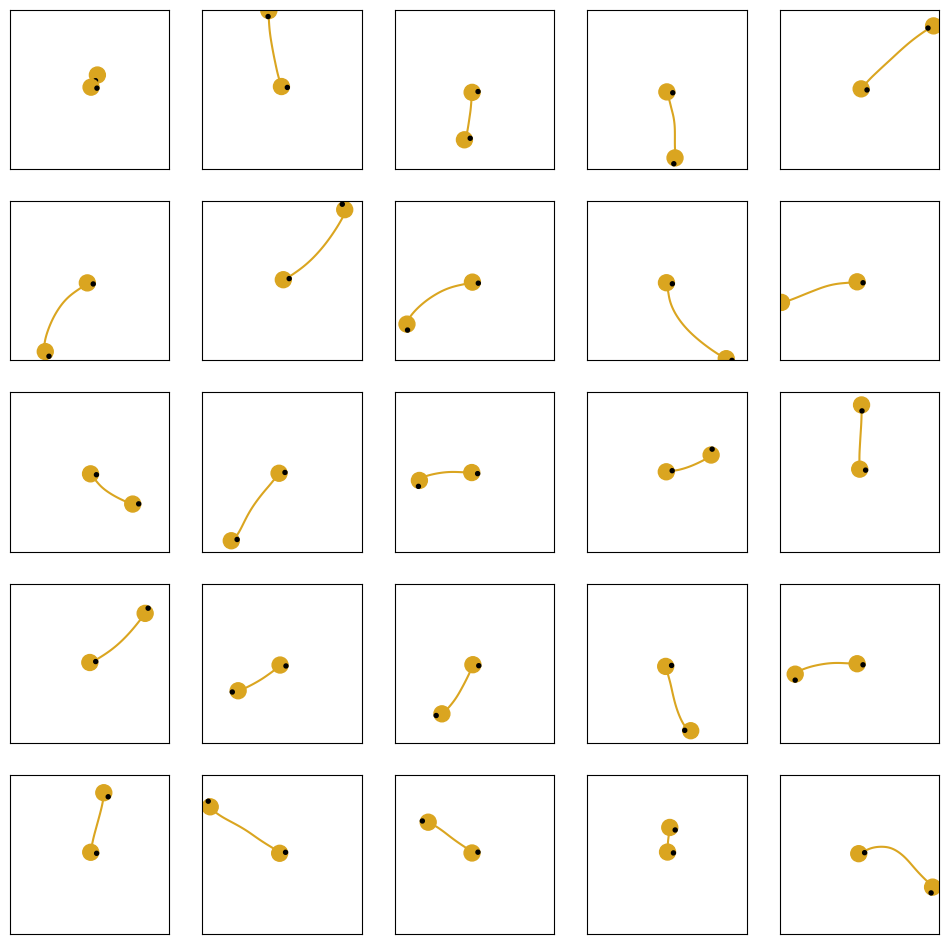
Finally, we plot some of the trajectories from the trained policy.
[22]:
from navground.sim.pyplot_helpers import plot_runs
fig = plot_runs(list(exp.runs.values())[:25],
columns=5,
step=100,
with_agent=True,
with_world=True,
world_kwargs={'in_box': True, 'no_ticks': True},
agent_kwargs={'plot_last_pose': True},
hide_axes=False,
width=12)
[28]:
from navground.learning import io
best_model = SAC.load(path / 'best_model')
io.export_policy_as_behavior(path='Pose/SAC', env=train_env, policy=best_model.policy)