BenchMARL#
BenchMARL implements several multi-agent RL algorithm, using the backbone of Torch RL.
In this notebook, agents perceive relative position and speed, similar to Distributed-SAC notebook but we use BenchMARL instead of StableBaseline3 to train a distibuited policy.
You can skip training and instead load the last trained policy by changing the flag below.
[1]:
from navground.learning.utils.jupyter import skip_if, run_if
training = True
[2]:
%load_ext autoreload
%autoreload 2
[3]:
import warnings
warnings.filterwarnings('ignore')
Continuos actions with MASAC#
MASAC is a multi-agent version of SAC (off-policy). It learns a centralized critic, while keeping the policy decentralized.
We start with a critic that takes the joint observation as input.
[70]:
from navground.learning import DefaultObservationConfig, ControlActionConfig
from navground.learning.parallel_env import make_vec_from_penv
from navground.learning.examples.pad import get_env, marker, neighbor
from navground.learning.scenarios.pad import render_kwargs
name = "Distributed"
action = ControlActionConfig(use_acceleration_action=True, max_acceleration=1, fix_orientation=True)
observation = DefaultObservationConfig(flat=False, include_velocity=True,
include_target_direction=False, flat_values=True)
sensors = [marker(), neighbor()]
train_env = get_env(action=action, observation=observation, sensors=sensors,
start_in_opposite_sides=False,
include_success=True, init_success=False, intermediate_success=True
)
test_env = get_env(action=action, observation=observation, sensors=sensors,
start_in_opposite_sides=True,
include_success=True, init_success=False, intermediate_success=True,
render_mode='rgb_array', render_kwargs=render_kwargs())
[5]:
%%skip_if $training
import pathlib, os
from navground.learning.utils.benchmarl import NavgroundExperiment
path = max(pathlib.Path(f'logs/{name}/MASAC').glob('*/checkpoints/*.pt'), key=os.path.getmtime)
experiment = NavgroundExperiment.reload_from_file(str(path))
experiment.folder_name
[6]:
%%run_if $training
import os
from benchmarl.algorithms import MasacConfig
from benchmarl.models.mlp import MlpConfig
from benchmarl.experiment import ExperimentConfig
from navground.learning.utils.benchmarl import NavgroundExperiment, ExportPolicyCallback
algorithm = MasacConfig.get_from_yaml()
model = MlpConfig.get_from_yaml()
config = ExperimentConfig.get_from_yaml()
config.loggers = [ 'csv']
config.render = True
config.evaluation_interval = 6000
config.evaluation_episodes = 30
config.lr = 3e-4
config.max_n_iters = 1
config.checkpoint_at_end = True
config.save_folder = f'logs/{name}/MASAC'
os.makedirs(config.save_folder, exist_ok=True)
experiment_masac = NavgroundExperiment(
env=train_env,
eval_env=test_env,
config=config,
model_config=model,
algorithm_config=algorithm,
seed=0,
callbacks=[ExportPolicyCallback()]
)
experiment_masac.folder_name
[6]:
PosixPath('logs/Distributed/MASAC/masac_navground_mlp__2399ac94_25_05_21-11_54_30')
[7]:
%%run_if $training
experiment_masac.run_for(iterations=20)
mean return = -9.643845558166504: 100%|███████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████| 20/20 [07:55<00:00, 23.76s/it]
We can evalute the policy directly using
[8]:
experiment_masac.evaluate_policy(n_eval_episodes=30)
[8]:
(-89.67737, 84.50013)
or we can construct a (single-agent) policy to be compatible with StableBaseline3, and then use their tools to evaluate it:
[9]:
from stable_baselines3.common.evaluation import evaluate_policy
from navground.learning.parallel_env import make_vec_from_penv
test_venv = make_vec_from_penv(test_env)
policy_masac = experiment_masac.get_single_agent_policy()
evaluate_policy(policy_masac, test_venv, n_eval_episodes=30)
[9]:
(-108.53362036148707, 84.10392849743498)
We can also load the exported best policy:
[10]:
policy_masac = experiment_masac.load_policy(name='best_policy')
evaluate_policy(policy_masac, test_venv, n_eval_episodes=30)
[10]:
(-18.0316518565019, 19.151734483397266)
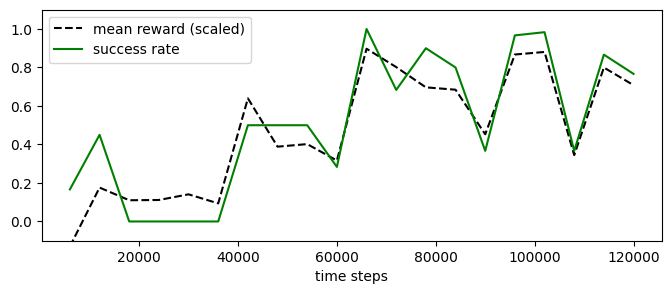
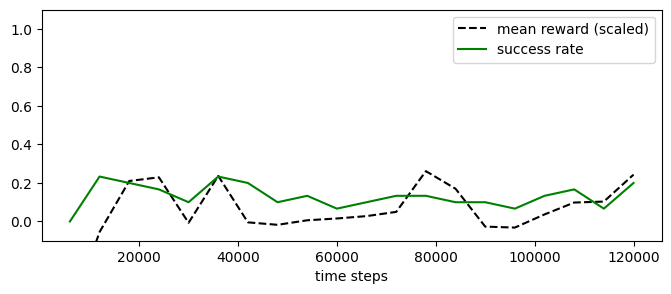
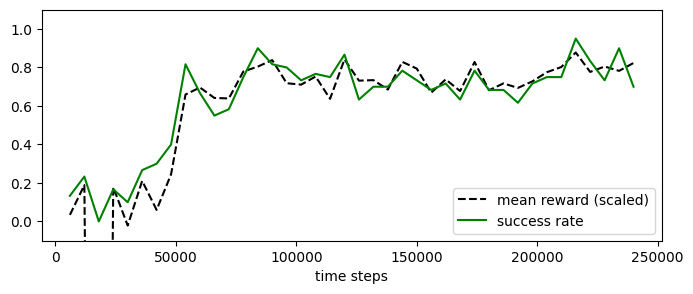
[11]:
experiment_masac.plot_eval_logs(reward_low=-200, reward_high=0, success=True, figsize=(8, 3))
[12]:
from navground.learning.evaluation.video import display_episode_video
display_episode_video(test_env, policy=policy_masac, factor=4, seed=1, **render_kwargs())
[12]:
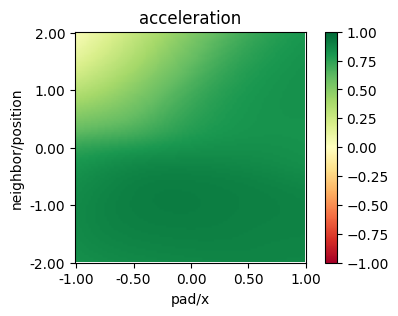
[13]:
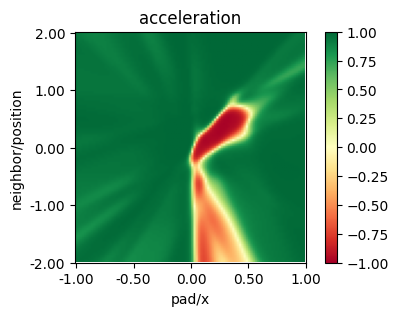
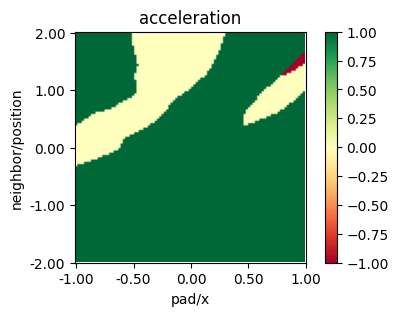
from navground.learning.utils.plot import plot_policy
plot_policy(policy_masac,
variable={'pad/x': (-1, 1), 'neighbor/position': (-2, 2)},
fix={'ego_velocity': 0.1, 'neighbor/velocity': 0.1},
actions={0: 'acceleration'}, width=5, height=3)
MASAC with global state critic#
In this second example, we use a critic that takes the global state of the multi-agent environment as input. In this case, as the observation are complete, we don’t expect that using the state will have a large impact. It will instead have an impact in other notebook where observation are partial.
We configure the state to contain (horizontal) position and speed of both agents.
[71]:
from navground.learning import DefaultStateConfig
state = DefaultStateConfig(include_y=False, include_position=True, include_velocity=True)
train_env_state = get_env(action=action, observation=observation, sensors=sensors, state=state,
start_in_opposite_sides=False, include_success=True, init_success=False, intermediate_success=True)
test_env_state = get_env(action=action, observation=observation, sensors=sensors, state=state,
start_in_opposite_sides=True, include_success=True, init_success=False, intermediate_success=True,
render_mode='rgb_array', render_kwargs=render_kwargs())
train_env_state.state_space
[71]:
Box([-1. -1. -0.14 -0.14], [1. 1. 0.14 0.14], (4,), float32)
[15]:
%%skip_if $training
path = max(pathlib.Path(f'logs/{name}/MASAC-State').glob('*/checkpoints/*.pt'), key=os.path.getmtime)
experiment_masac_state = NavgroundExperiment.reload_from_file(str(path))
experiment_masac_state.folder_name
[16]:
%%run_if $training
algorithm = MasacConfig.get_from_yaml()
model = MlpConfig.get_from_yaml()
config = ExperimentConfig.get_from_yaml()
config.loggers = [ 'csv']
config.render = True
config.evaluation_interval = 6000
config.evaluation_episodes = 30
config.lr = 3e-4
config.max_n_iters = 1
config.checkpoint_at_end = True
config.save_folder = f'logs/{name}/MASAC-State'
os.makedirs(config.save_folder, exist_ok=True)
experiment_masac_state = NavgroundExperiment(
env=train_env_state,
eval_env=test_env_state,
config=config,
model_config=model,
algorithm_config=algorithm,
seed=0,
callbacks=[ExportPolicyCallback()]
)
experiment_masac_state.folder_name
[16]:
PosixPath('logs/Distributed/MASAC-State/masac_navground_mlp__dcf869d3_25_05_21-12_02_37')
[17]:
%%run_if $training
experiment_masac_state.run_for(iterations=20)
mean return = -3.12227725982666: 100%|████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████| 20/20 [08:30<00:00, 25.54s/it]
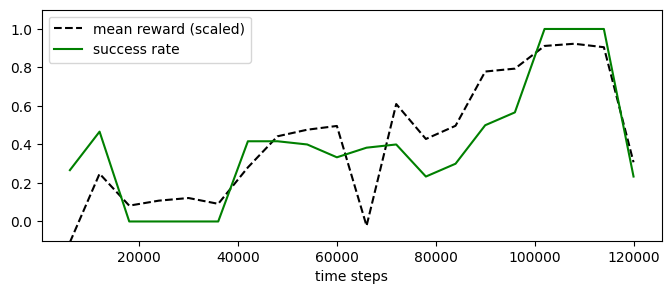
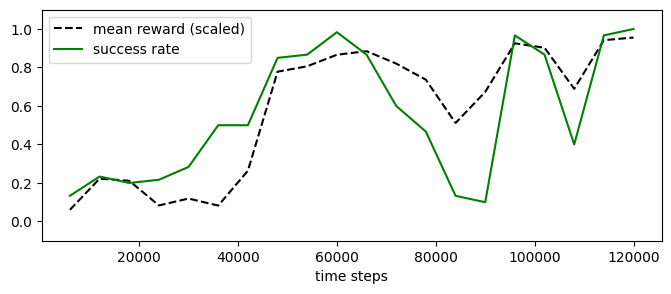
[18]:
experiment_masac_state.plot_eval_logs(reward_low=-200, reward_high=0, success=True, figsize=(8, 3))
[19]:
policy_masac_state = experiment_masac_state.load_policy(name='best_policy')
evaluate_policy(policy_masac_state, test_venv, n_eval_episodes=30)
[19]:
(-14.781858468055725, 16.883285865221644)
[20]:
display_episode_video(test_env, policy=policy_masac_state, factor=4, seed=123, **render_kwargs())
[20]:
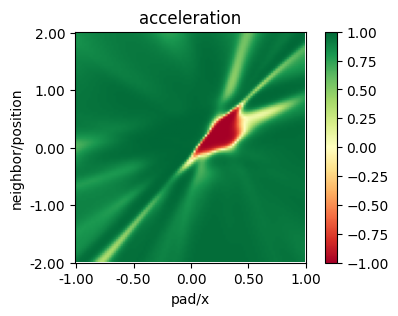
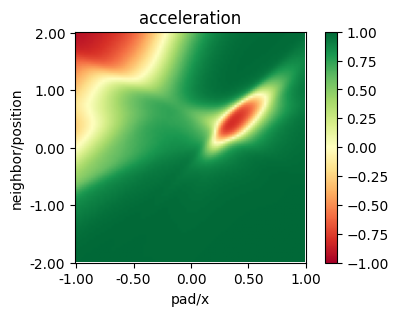
[21]:
plot_policy(policy_masac_state,
variable={'pad/x': (-1, 1), 'neighbor/position': (-2, 2)},
fix={'ego_velocity': 0.1, 'neighbor/velocity': 0.1},
actions={0: 'acceleration'}, width=5, height=3)
MAPPO#
Mappo is a multi-agent variant of PPO (on-policy).
[22]:
%%skip_if $training
path = max(pathlib.Path(f'logs/{name}/MAPPO').glob('*/checkpoints/*.pt'), key=os.path.getmtime)
experiment_mappo = NavgroundExperiment.reload_from_file(str(path))
experiment_mappo.folder_name
[26]:
%%run_if $training
from benchmarl.algorithms import MappoConfig
algorithm = MappoConfig.get_from_yaml()
model = MlpConfig.get_from_yaml()
config = ExperimentConfig.get_from_yaml()
config.loggers = [ 'csv']
config.render = False
config.evaluation_interval = 6000
config.evaluation_episodes = 30
config.lr = 3e-4
config.max_n_iters = 1
config.checkpoint_at_end = True
config.save_folder = f'logs/{name}/MAPPO'
config.max_n_iters = 1
os.makedirs(config.save_folder, exist_ok=True)
experiment_mappo = NavgroundExperiment(
env=train_env,
eval_env=test_env,
config=config,
model_config=model,
algorithm_config=algorithm,
seed=0,
callbacks=[ExportPolicyCallback()]
)
experiment_mappo.folder_name
[26]:
PosixPath('logs/Distributed/MAPPO/mappo_navground_mlp__e7616175_25_05_21-12_13_25')
[27]:
%%run_if $training
experiment_mappo.run_for(iterations=20)
mean return = -47.4769401550293: 100%|████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████| 20/20 [05:12<00:00, 15.62s/it]
[28]:
experiment_mappo.plot_eval_logs(reward_low=-200, reward_high=0, success=True, figsize=(8, 3))
[29]:
policy_mappo = experiment_mappo.load_policy(name='best_policy')
evaluate_policy(policy_mappo, test_venv, n_eval_episodes=30)
[29]:
(-149.71470490296682, 131.72873973549812)
[83]:
display_episode_video(test_env, policy=policy_mappo, factor=4, seed=123, **render_kwargs())
[83]:
[ ]:
plot_policy(policy_mappo,
variable={'pad/x': (-1, 1), 'neighbor/position': (-2, 2)},
fix={'ego_velocity': 0.1, 'neighbor/velocity': 0.1},
actions={0: 'acceleration'}, width=5, height=3)
As for PPO (see Dummy-Continuous notebook), MAPPO struggles to converge towards the an optimal policy when the agents are initialized uniformly along the corridor.
MAPPO starting from opposite sides#
Let us check if it learns better (similar to PPO) when the agents are initialized on opposing sides.
[76]:
train_env_os = get_env(action=action, observation=observation, sensors=sensors,
start_in_opposite_sides=True, include_success=True,
init_success=False, intermediate_success=True)
[77]:
%%skip_if $training
path = max(pathlib.Path(f'logs/{name}/MAPPO-StartFromOpposingSides').glob('*/checkpoints/*.pt'), key=os.path.getmtime)
experiment_mappo_os = NavgroundExperiment.reload_from_file(str(path))
experiment_mappo_os.folder_name
[78]:
%%run_if $training
algorithm = MappoConfig.get_from_yaml()
model = MlpConfig.get_from_yaml()
config = ExperimentConfig.get_from_yaml()
config.loggers = [ 'csv']
config.render = False
config.evaluation_interval = 6000
config.evaluation_episodes = 30
config.lr = 3e-4
config.max_n_iters = 1
config.checkpoint_at_end = True
config.save_folder = f'logs/{name}/MAPPO-StartFromOpposingSides'
config.max_n_iters = 1
os.makedirs(config.save_folder, exist_ok=True)
experiment_mappo_os = NavgroundExperiment(
env=train_env_os,
eval_env=test_env,
config=config,
model_config=model,
algorithm_config=algorithm,
seed=0,
callbacks=[ExportPolicyCallback()]
)
[79]:
%%run_if $training
experiment_mappo_os.run_for(iterations=20)
mean return = -47.3065185546875: 100%|████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████| 20/20 [06:06<00:00, 18.34s/it]
[80]:
experiment_mappo_os.plot_eval_logs(reward_low=-200, reward_high=0, success=True, figsize=(8, 3))
[84]:
policy_mappo_os = experiment_mappo_os.load_policy(name='best_policy')
evaluate_policy(policy_mappo_os, test_venv, n_eval_episodes=30)
[84]:
(-31.93338553905487, 87.03458167280833)
[85]:
display_episode_video(test_env, policy=policy_mappo_os, factor=4, seed=123, **render_kwargs())
[85]:
[82]:
plot_policy(policy_mappo_os,
variable={'pad/x': (-1, 1), 'neighbor/position': (-2, 2)},
fix={'ego_velocity': 0.1, 'neighbor/velocity': 0.1},
actions={0: 'acceleration'}, width=5, height=3)
MASAC with discrete actions#
[38]:
from navground.learning.config.discrete_control_action import DiscreteControlActionConfig
name = "DistributedDiscrete"
action_discrete = DiscreteControlActionConfig(use_acceleration_action=True, max_acceleration=0.1,
fix_orientation=True)
train_env_discrete = get_env(action=action_discrete, observation=observation, sensors=sensors, state=state,
start_in_opposite_sides=False, include_success=False)
test_env_discrete = get_env(action=action_discrete, observation=observation, sensors=sensors, state=state,
start_in_opposite_sides=True,
include_success=True, init_success=False, intermediate_success=True,
render_mode='rgb_array', render_kwargs=render_kwargs())
train_env_discrete.action_space(0)
[38]:
Discrete(3)
[39]:
%%skip_if $training
path = max(pathlib.Path(f'logs/{name}/MASAC').glob('*/checkpoints/*.pt'), key=os.path.getmtime)
experiment_masac_discrete = NavgroundExperiment.reload_from_file(str(path))
experiment_masac_discrete.folder_name
[40]:
%%run_if $training
algorithm = MasacConfig.get_from_yaml()
model = MlpConfig.get_from_yaml()
config = ExperimentConfig.get_from_yaml()
config.loggers = [ 'csv']
config.render = True
config.evaluation_interval = 6000
config.evaluation_episodes = 30
config.lr = 3e-4
config.max_n_iters = 1
config.checkpoint_at_end = True
config.save_folder = f'logs/{name}/MASAC'
os.makedirs(config.save_folder, exist_ok=True)
experiment_masac_discrete = NavgroundExperiment(
env=train_env_discrete,
eval_env=test_env_discrete,
config=config,
model_config=model,
algorithm_config=algorithm,
seed=0,
callbacks=[ExportPolicyCallback()]
)
experiment_masac_discrete.folder_name
[40]:
PosixPath('logs/DistributedDiscrete/MASAC/masac_navground_mlp__3694a5f2_25_05_21-12_23_48')
[41]:
experiment_masac_discrete.run_for(iterations=40)
mean return = -13.662088394165039: 100%|██████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████| 40/40 [31:41<00:00, 47.55s/it]
[42]:
experiment_masac_discrete.plot_eval_logs(reward_low=-200, reward_high=0, success=True, figsize=(8, 3))
[44]:
policy_masac_discrete = experiment_masac_discrete.load_policy(name='best_policy')
test_venv_discrete = make_vec_from_penv(test_env_discrete)
evaluate_policy(policy_masac_discrete, test_venv_discrete, n_eval_episodes=30)
[44]:
(-61.49761885007222, 91.95323870290115)
[86]:
display_episode_video(test_env_discrete, policy=policy_masac_discrete, factor=4, seed=123, **render_kwargs())
[86]:
[ ]:
plot_policy(policy_masac_discrete,
variable={'pad/x': (-1, 1), 'neighbor/position': (-2, 2)},
fix={'ego_velocity': 0.1, 'neighbor/velocity': 0.1},
actions={0: 'acceleration'}, width=5, height=3)
[ ]: