Centralized policy trained with SAC#
In this notebook, we train a centralized policy that take as input the observation of both agents and outputs both actions. The rewards of the two agents is summed together. In our case, it is enough to provide as observations the relative position of the pad and agent speed.
You can skip training and instead load the last trained policy by changing the flag below.
[1]:
%load_ext autoreload
%autoreload 2
[2]:
from navground.learning.utils.jupyter import skip_if, run_if
training = True
[3]:
from navground import core, sim
from navground.learning import ControlActionConfig, DefaultObservationConfig
from stable_baselines3.common.monitor import Monitor
from navground.learning.parallel_env import JointEnv
from navground.learning.examples.pad import get_env, marker
name = "Centralized"
action = ControlActionConfig(use_acceleration_action=True, max_acceleration=1, fix_orientation=True)
observation = DefaultObservationConfig(flat=False, include_velocity=True, include_target_direction=False)
sensors = [marker()]
train_env = get_env(action=action, observation=observation,
sensors=sensors, start_in_opposite_sides=False)
train_venv = JointEnv(train_env)
test_env = get_env(action=action, observation=observation,
sensors=sensors, start_in_opposite_sides=True)
test_venv = Monitor(JointEnv(test_env))
Observations from the two agents are stacked together (the first axis indicizes the agents).
[4]:
train_venv.observation_space
[4]:
Dict('ego_velocity': Box(-0.14, 0.14, (2, 1), float32), 'pad/x': Box(-1.0, 1.0, (2, 1), float32))
like their actions (linear accelerations)
[5]:
train_venv.action_space
[5]:
Box(-1.0, 1.0, (2, 1), float32)
[6]:
%%skip_if $training
import pathlib, os
from stable_baselines3 import SAC
log = max(pathlib.Path(f'logs/{name}/SAC').glob('*'), key=os.path.getmtime)
[7]:
%%run_if $training
from stable_baselines3 import SAC
from datetime import datetime as dt
from stable_baselines3.common.logger import configure
from navground.learning.utils.sb3 import callbacks
from navground.learning.scenarios.pad import render_kwargs
model = SAC("MultiInputPolicy", train_venv, verbose=0)
stamp = dt.now().strftime("%Y%m%d_%H%M%S")
log = f"logs/{name}/SAC/{stamp}"
model.set_logger(configure(log, ["csv", "tensorboard"]))
cbs = callbacks(venv=test_venv, best_model_save_path=log,
eval_freq=1000, export_to_onnx=True, grouped=True, **render_kwargs())
log
[7]:
'logs/Centralized/SAC/20250521_100129'
[8]:
%%run_if $training
model.learn(total_timesteps=50_000, reset_num_timesteps=False, log_interval=10, callback=cbs)
model.num_timesteps
[8]:
50000
[9]:
from stable_baselines3.common.evaluation import evaluate_policy
best_model = SAC.load(f'{log}/best_model')
evaluate_policy(best_model.policy, test_venv, n_eval_episodes=100)
[9]:
(-55.15963947, 19.354489778550846)
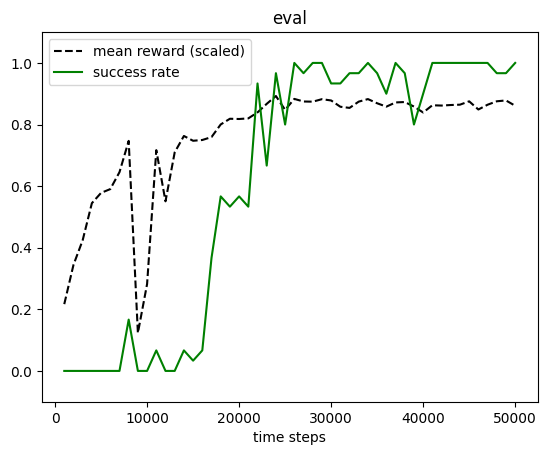
[10]:
from navground.learning.utils.sb3 import plot_eval_logs
plot_eval_logs(log, reward_low=-400, reward_high=0, success=True)
[11]:
from navground.learning.evaluation.video import display_episode_video
display_episode_video(test_env, policy=best_model.policy, factor=4, seed=1,
grouped=True, **render_kwargs())
[11]:
[14]:
from navground.learning.evaluation.video import record_episode_video
record_episode_video(test_env, policy=best_model.policy, path=f'../videos/{name}.mp4', seed=1,
grouped=True, **render_kwargs())
Policy#
Let us have a look at the trained policy.
[15]:
import numpy as np
xs = np.linspace(-1, 1, 101, dtype=np.float32)
ys = np.linspace(-1, 1, 101, dtype=np.float32)
xv, yv = np.meshgrid(xs, ys)
obs = {'pad/x': np.stack([xv, yv], axis=-1).reshape(-1, 2, 1),
'ego_velocity': np.full((101, 101, 2, 1), 0.07, dtype=np.float32)}
act, _ = model.policy.predict(obs, deterministic=True)
act = act.reshape(101, 101, 2)
[16]:
from matplotlib import pyplot as plt
fig, axs = plt.subplots(ncols=2, figsize=(10, 3))
for i, ax in enumerate(axs):
im = ax.imshow(act[::-1, :, i], vmin=-1, vmax=1, cmap='RdYlGn')
ax.set_xlabel('pad/x #0')
ax.set_ylabel('pad/x #1')
lxs = [f'{x:.2f}' for x in np.linspace(xs[0], xs[-1], 5)]
lys = [f'{y:.2f}' for y in np.linspace(ys[0], ys[-1], 5)][::-1]
ax.set_xticks(np.linspace(0, 101, 5), lxs)
ax.set_yticks(np.linspace(0, 101, 5), lys)
ax.title.set_text(f'acceleration #{i}')
fig.colorbar(im, ax=axs.ravel().tolist())
# fig.suptitle('Central policy');
[16]:
<matplotlib.colorbar.Colorbar at 0x33bb29b20>
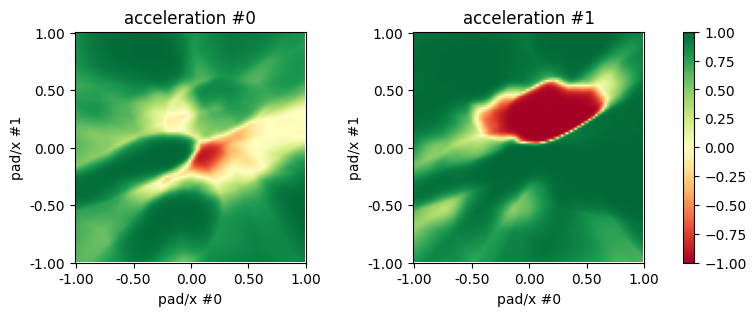
We see that the central policy tends to favor one of the two agents, make the other brake even if it would be nearer to the pad.
[ ]: