Model-based behaviors#
In this notebook we measure the performance of 4 model-based navigation behaviors:
Dummy, which ignores the pad and the other agent.
[1]:
from navground import sim, core
from navground.sim.ui.video import display_video
from navground.learning.behaviors.pad import DistributedPadBehavior, CentralizedPadBehavior, StopAtPadBehavior
from navground.learning.scenarios.pad import PadScenario, render_kwargs
scenario = sim.load_scenario("""
type: Pad
start_in_opposite_sides: true
groups:
- number: 2
behavior:
type: Dummy
""")
world = scenario.make_world(seed=2)
display_video(world, time_step=0.1, duration=10, factor=4, **render_kwargs())
[1]:
StopAtPad, which stop nearby the pad without crossing it.
[2]:
scenario = sim.load_scenario("""
type: Pad
start_in_opposite_sides: true
groups:
- number: 2
behavior:
type: StopAtPad
""")
world = scenario.make_world(seed=2)
display_video(world, time_step=0.1, duration=10, factor=4, **render_kwargs())
[2]:
Pad, a distributed behavior that tries to solve the problem optimally by tuning the speed to avoid conflicts and gives precedence to the other agent if it would exit first from the pad. The agent does not know the other agent desired speed, which it infer from its current speed.
[3]:
scenario = sim.load_scenario("""
type: Pad
start_in_opposite_sides: true
groups:
- number: 2
behavior:
type: Pad
state_estimation:
type: Bounded
range: 10
""")
world = scenario.make_world(seed=2)
display_video(world, time_step=0.1, duration=10, factor=4, **render_kwargs())
[3]:
CentralizedPad, a centralized behavior which is similar to Pad but knows everything about both agents and control them at the same time.
[4]:
from navground import sim
from navground.sim.ui.video import display_video
scenario = sim.load_scenario("""
type: Pad
start_in_opposite_sides: true
groups:
- number: 2
behavior:
type: CentralizedPad
""")
world = scenario.make_world(seed=2)
world._prepare()
video = display_video(world, time_step=0.1, duration=10, factor=4, **render_kwargs())
world._close()
video
[4]:
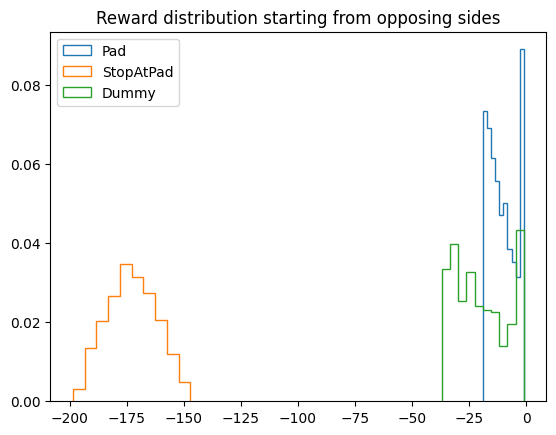
Reward starting from opposing sides#
We compute the reward distribution when the agents start from oppositing sides of the map. The reward function is composed by two terms:
1 - efficacy(i.e., 0 if moving forwards at full desired speed)pad_penaltywhen two agents are on the pad at the same time.
here, we compute the reward for pad_penalty=1, which we will later use to pick a penalty that balance the tendency to stop and cross the pad.
[5]:
from navground.learning.examples.pad import PadReward
reward = PadReward(pad_penalty=1)
[6]:
from navground.learning.probes import RewardProbe
from navground.learning.probes.success import SuccessProbe
from navground.learning.examples.pad import is_success, is_failure
scenario = sim.load_scenario("""
type: Pad
groups:
- number:
sampler: sequence
values: [2, 0, 0]
once: true
behavior:
type: Pad
state_estimation:
type: Bounded
range: 10
- number:
sampler: sequence
values: [0, 2, 0]
once: true
behavior:
type: StopAtPad
- number:
sampler: sequence
values: [0, 0, 2]
once: true
behavior:
type: Dummy
start_in_opposite_sides: true
""")
exp = sim.Experiment(time_step=0.1, steps=200)
exp.scenario = scenario
exp.add_record_probe("reward", RewardProbe.with_reward(reward=reward))
exp.add_record_probe("success", SuccessProbe.with_criteria(is_success=is_success, is_failure=is_failure))
exp.terminate_when_all_idle_or_stuck = False
We perform 2000 runs for each behavior, which is shared by the two agents.
[7]:
exp.run(number_of_runs=6 * 1000)
[11]:
import numpy as np
import pandas as pd
rewards = np.asarray([np.sum(run.records['reward']) / 2 for run in exp.runs.values()]).reshape(-1, 3)
success = np.asarray([np.mean(np.asarray(run.records['success']) > 0) for run in exp.runs.values()]).reshape(-1, 3)
steps = np.asarray([run.recorded_steps for run in exp.runs.values()]).reshape(-1, 3)
df = pd.DataFrame()
for i, name in enumerate(('Pad', 'Stop', 'Dummy')):
df[name] = {'reward mean': np.mean(rewards[:, i]),
'reward std': np.std(rewards[:, i]),
'success rate': np.mean(success[:, i]),
'length mean': np.mean(steps[:, i]),
'length std': np.std(steps[:, i])}
df.to_csv('behaviors.csv')
[12]:
pd.set_option("display.precision", 2)
df.T
[12]:
| reward mean | reward std | success rate | length mean | length std | |
|---|---|---|---|---|---|
| Pad | -10.47 | 5.80 | 1.00 | 145.65 | 11.81 |
| Stop | -172.76 | 10.71 | 0.00 | 200.00 | 0.00 |
| Dummy | -19.77 | 11.46 | 0.14 | 126.53 | 12.63 |
[13]:
from matplotlib import pyplot as plt
for rs, name in zip(rewards.T, ('Pad', 'StopAtPad', 'Dummy')):
plt.hist(rs, density=True, label=name, histtype='step')
plt.title("Reward distribution starting from opposing sides")
plt.legend();
[14]:
easy = rewards[:, -1] >= -1.1
easy_prob = np.sum(easy, axis=0) / len(easy)
print(f'about {easy_prob:.0%} of the cases requires no coordination')
about 11% of the cases requires no coordination
Penality for efficiency should make Dummy and StopAtPad almost even:
[15]:
ms = np.mean(rewards, axis=0)
print(f'Penality: {round(ms[1] / ms[2], 2)}')
Penality: 8.74
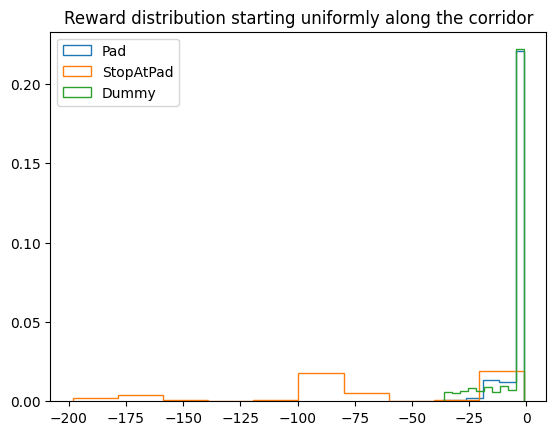
Reward starting uniformly along the corridor#
We also compute the reward distribution when the agents start uniformly along the corridor.
[16]:
scenario = sim.load_scenario("""
type: Pad
groups:
- number:
sampler: sequence
values: [2, 0, 0]
once: true
behavior:
type: Pad
state_estimation:
type: Bounded
range: 10
- number:
sampler: sequence
values: [0, 2, 0]
once: true
behavior:
type: StopAtPad
- number:
sampler: sequence
values: [0, 0, 2]
once: true
behavior:
type: Dummy
start_in_opposite_sides: false
""")
exp = sim.Experiment(time_step=0.1, steps=200)
exp.scenario = scenario
exp.add_record_probe("reward", RewardProbe.with_reward(reward=reward))
exp.add_record_probe("success", SuccessProbe.with_criteria(is_success=is_success, is_failure=is_failure))
exp.terminate_when_all_idle_or_stuck = False
[17]:
exp.run(number_of_runs=6 * 1000)
[18]:
rewards = np.asarray([np.sum(run.records['reward']) / 2 for run in exp.runs.values()]).reshape(-1, 3)
success = np.asarray([np.mean(np.asarray(run.records['success']) > 0) for run in exp.runs.values()]).reshape(-1, 3)
steps = np.asarray([run.recorded_steps for run in exp.runs.values()]).reshape(-1, 3)
df = pd.DataFrame()
for i, name in enumerate(('Pad', 'Stop', 'Dummy')):
df[name] = {'reward mean': np.mean(rewards[:, i]),
'reward std': np.std(rewards[:, i]),
'success rate': np.mean(success[:, i]),
'length mean': np.mean(steps[:, i]),
'length std': np.std(steps[:, i])}
df.to_csv('behaviors_same_side.csv')
[19]:
pd.set_option("display.precision", 2)
df.T
[19]:
| reward mean | reward std | success rate | length mean | length std | |
|---|---|---|---|---|---|
| Pad | -3.81776 | 5.53239 | 0.94150 | 101.324 | 37.04168 |
| Stop | -66.44618 | 58.58046 | 0.56125 | 145.944 | 68.60380 |
| Dummy | -5.12508 | 8.65664 | 0.76000 | 96.188 | 34.11926 |
[20]:
for rs, name in zip(rewards.T, ('Pad', 'StopAtPad', 'Dummy')):
plt.hist(rs, density=True, label=name, histtype='step')
plt.title("Reward distribution starting uniformly along the corridor")
plt.legend();
[21]:
easy = rewards[:, -1] >= -1.1
easy_prob = np.sum(easy, axis=0) / len(easy)
print(f'about {easy_prob:.0%} of the cases requires no coordination')
about 75% of the cases requires no coordination
Penality for efficiency should make Dummy and StopAtPad almost even:
[22]:
ms = np.mean(rewards, axis=0)
print(f'Penality: {round(ms[1] / ms[2], 2)}')
Penality: 12.96
[ ]: