Parallel SAC with MLP#
We will try combinations of:
exchanging 1 bit vs 1 float
adding or not the neighbor term to the reward .
[14]:
%load_ext autoreload
%autoreload 2
The autoreload extension is already loaded. To reload it, use:
%reload_ext autoreload
You can skip training and instead load the last trained policy by changing the flag below.
[15]:
from navground.learning.utils.jupyter import skip_if, run_if
training = True
[16]:
from navground.learning import DefaultObservationConfig
from navground.learning.parallel_env import make_vec_from_penv
from navground.learning.config.control_action_with_comm import ControlActionWithCommConfig
from stable_baselines3.common.vec_env import VecMonitor
from navground.learning.examples.pad import get_env, comm, marker, PadReward
comm_size = 1
action = ControlActionWithCommConfig(use_acceleration_action=True, max_acceleration=1,
fix_orientation=True, comm_size=comm_size)
observation = DefaultObservationConfig(flat=False, include_velocity=True, include_target_direction=False)
Floating-point message, without reward sharing#
[17]:
name = "DistributedCommFloatWithoutRewardSharing"
sensors = [comm(size=comm_size, binarize=False), marker()]
train_env = get_env(action=action, observation=observation,
sensors=sensors, start_in_opposite_sides=False,
reward=PadReward(neighbor_weight=0))
train_venv = VecMonitor(make_vec_from_penv(train_env, num_envs=4))
test_env = get_env(action=action, observation=observation,
sensors=sensors, start_in_opposite_sides=True)
test_venv = VecMonitor(make_vec_from_penv(test_env, num_envs=4))
[18]:
test_venv.observation_space, train_venv.observation_space
[18]:
(Dict('neighbor/comm': Box(-1.0, 1.0, (1,), float32), 'pad/x': Box(-1.0, 1.0, (1,), float32), 'ego_velocity': Box(-0.14, 0.14, (1,), float32)),
Dict('neighbor/comm': Box(-1.0, 1.0, (1,), float32), 'pad/x': Box(-1.0, 1.0, (1,), float32), 'ego_velocity': Box(-0.14, 0.14, (1,), float32)))
[19]:
%%skip_if $training
import pathlib, os
from stable_baselines3 import SAC
log_float = max(pathlib.Path(f'logs/{name}/SAC').glob('*'), key=os.path.getmtime)
[ ]:
%%run_if $training
from stable_baselines3 import SAC
from datetime import datetime as dt
from stable_baselines3.common.logger import configure
from navground.learning.utils.sb3 import callbacks
from navground.learning.scenarios.pad import render_kwargs
kwargs = render_kwargs(comm=True, low=-1, high=1, binarize=False,
color_low=(1, 0, 0), color_high=(0, 1, 0))
model_float = SAC("MultiInputPolicy", train_venv, verbose=0, use_sde=False)
stamp = dt.now().strftime("%Y%m%d_%H%M%S")
log_float = f"logs/{name}/SAC/{stamp}"
model_float.set_logger(configure(log_float, ["csv", "tensorboard"]))
cbs = callbacks(venv=test_venv, best_model_save_path=log_float,
eval_freq=500, export_to_onnx=True, **kwargs)
log_float
'logs/DistributedCommFloatWithoutRewardSharing/SAC/20250521_140207'
[21]:
%%run_if $training
model_float.learn(total_timesteps=300_000,reset_num_timesteps=False, log_interval=10, callback=cbs)
model_float.num_timesteps
[21]:
300000
[22]:
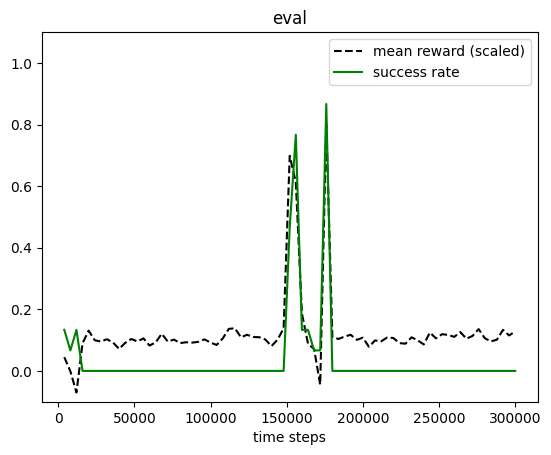
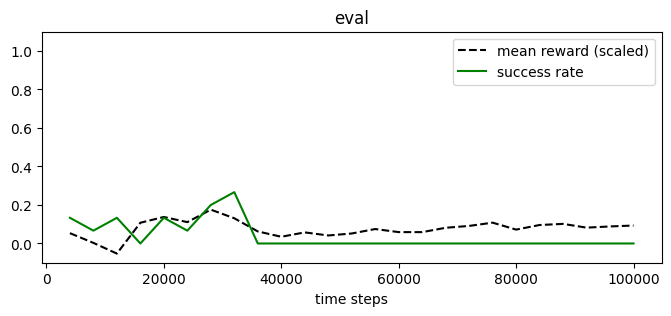
from navground.learning.utils.sb3 import plot_eval_logs
plot_eval_logs(log_float, reward_low=-200, reward_high=0, success=True, figsize=(8, 3))
[23]:
from stable_baselines3.common.evaluation import evaluate_policy
best_model_float = SAC.load(f'{log_float}/best_model')
evaluate_policy(best_model_float.policy, test_venv, n_eval_episodes=100)
[23]:
(-26.62414, 40.722)
[27]:
from navground.learning.evaluation.video import display_episode_video
display_episode_video(test_env, policy=best_model_float.policy, factor=4, seed=1, **kwargs)
[27]:
[28]:
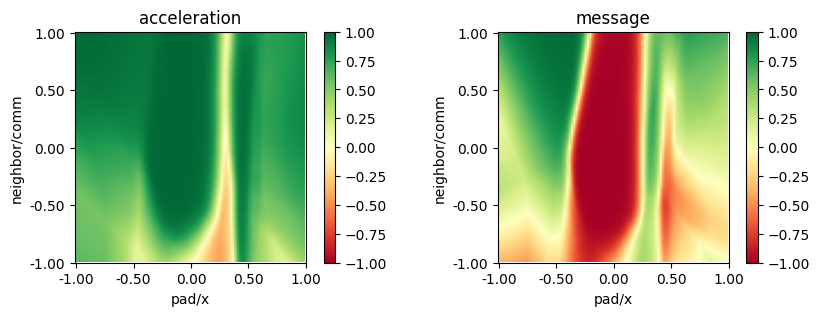
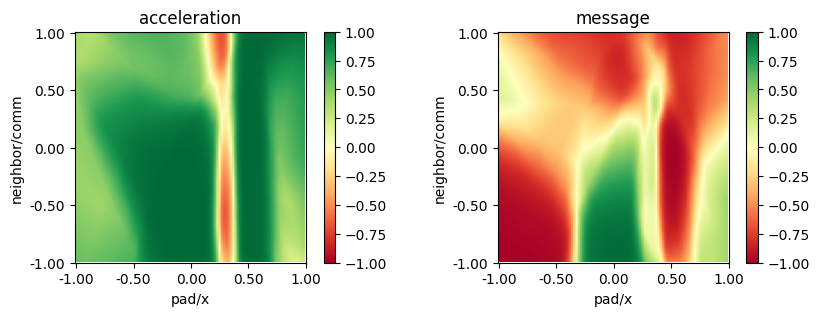
from navground.learning.utils.plot import plot_policy
plot_policy(best_model_float.policy,
variable={'pad/x': (-1, 1), 'neighbor/comm': (-1, 1)},
fix={'ego_velocity': 0.1},
actions={0: 'acceleration', 1: 'message'},
width=5, height=3)
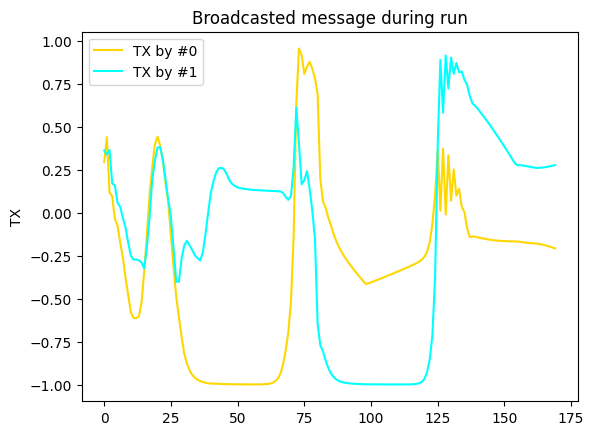
Let us record communication during a run and plot it
[31]:
from navground.learning.evaluation.experiment import make_experiment_with_env
from navground.learning.probes.comm import CommProbe
from matplotlib import pyplot as plt
import numpy as np
exp = make_experiment_with_env(test_env, policy=best_model_float.policy)
exp.add_record_probe('tx', CommProbe)
run = exp.run_once(seed=1)
plt.figure(figsize=(8, 3))
for i, color in enumerate(('gold', 'cyan')):
plt.plot(np.asarray(run.records['tx'])[:, i, 0], color=color, label=f"TX by #{i}")
plt.legend()
plt.ylabel("TX")
plt.title("Broadcasted message during run");
…
Floating-point message, with reward sharing#
[33]:
name = "DistributedCommFloatWithRewardSharing"
train_env = get_env(action=action, observation=observation,
sensors=sensors, start_in_opposite_sides=False,
reward=PadReward(neighbor_weight=0.5))
train_venv = VecMonitor(make_vec_from_penv(train_env, num_envs=4))
[34]:
%%skip_if $training
log_float_sharing = max(pathlib.Path(f'logs/{name}/SAC').glob('*'), key=os.path.getmtime)
[35]:
%%run_if $training
model_float_sharing = SAC("MultiInputPolicy", train_venv, verbose=0, use_sde=False)
stamp = dt.now().strftime("%Y%m%d_%H%M%S")
log_float_sharing = f"logs/{name}/SAC/{stamp}"
model_float_sharing.set_logger(configure(log_float_sharing, ["csv", "tensorboard"]))
cbs = callbacks(venv=test_venv, best_model_save_path=log_float_sharing,
eval_freq=500, export_to_onnx=True, **kwargs)
log_float_sharing
[35]:
'logs/DistributedCommFloatWithRewardSharing/SAC/20250521_141550'
[36]:
%%run_if $training
model_float_sharing.learn(total_timesteps=300_000,reset_num_timesteps=False,
log_interval=10, callback=cbs)
model_float_sharing.num_timesteps
[36]:
300000
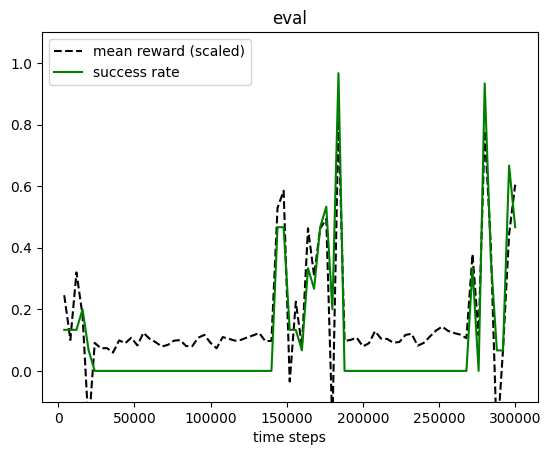
[37]:
plot_eval_logs(log_float_sharing, reward_low=-200, reward_high=0,
success=True, figsize=(8, 3))
[38]:
best_model_float_sharing = SAC.load(f'{log_float_sharing}/best_model')
evaluate_policy(best_model_float_sharing.policy, test_venv, n_eval_episodes=100)
[38]:
(-36.095158, 25.466118)
[39]:
display_episode_video(test_env, policy=best_model_float_sharing.policy, factor=4, seed=1, **kwargs)
[39]:
[40]:
plot_policy(best_model_float_sharing.policy,
variable={'pad/x': (-1, 1), 'neighbor/comm': (-1, 1)},
fix={'ego_velocity': 0.1},
actions={0: 'acceleration', 1: 'message'},
width=5, height=3)
Binary message, with reward sharing#
[68]:
name = "DistributedCommBinaryWithRewardSharing"
sensors_bin = [comm(size=comm_size, binarize=True), marker()]
train_env_bin = get_env(action=action, observation=observation,
sensors=sensors_bin, start_in_opposite_sides=False,
reward=PadReward(neighbor_weight=0.5))
train_venv_bin = VecMonitor(make_vec_from_penv(train_env_bin, num_envs=4))
test_env_bin = get_env(action=action, observation=observation,
sensors=sensors_bin, start_in_opposite_sides=True)
test_venv_bin = VecMonitor(make_vec_from_penv(test_env_bin, num_envs=4))
[69]:
test_venv_bin.observation_space
[69]:
Dict('neighbor/comm': Box(0, 1, (1,), int8), 'pad/x': Box(-1.0, 1.0, (1,), float32), 'ego_velocity': Box(-0.14, 0.14, (1,), float32))
[70]:
%%skip_if $training
log_bin_sharing = max(pathlib.Path(f'logs/{name}/SAC').glob('*'), key=os.path.getmtime)
[71]:
%%run_if $training
model_bin_sharing = SAC("MultiInputPolicy", train_venv_bin, verbose=0, use_sde=False)
stamp = dt.now().strftime("%Y%m%d_%H%M%S")
log_bin_sharing = f"logs/{name}/SAC/{stamp}"
model_bin_sharing.set_logger(configure(log_bin_sharing, ["csv", "tensorboard"]))
kwargs_bin = render_kwargs(comm=True, low=0, high=1,
color_low=(1, 0, 0), color_high=(0, 1, 0))
cbs = callbacks(venv=test_venv_bin, best_model_save_path=log_bin_sharing,
eval_freq=500, export_to_onnx=True, **kwargs_bin)
log_bin_sharing
[71]:
'logs/DistributedCommBinaryWithRewardSharing/SAC/20250521_144105'
[72]:
%%run_if $training
model_bin_sharing.learn(total_timesteps=100_000, reset_num_timesteps=False,
log_interval=10, callback=cbs)
model_bin_sharing.num_timesteps
[72]:
100000
[73]:
plot_eval_logs(log_bin_sharing, reward_low=-200, reward_high=0,
success=True, figsize=(8, 3))
[77]:
best_model_bin_sharing = SAC.load(f'{log_bin_sharing}/best_model')
evaluate_policy(best_model_bin_sharing.policy, test_venv_bin, n_eval_episodes=100)
[77]:
(-209.73132, 122.59714)
[81]:
display_episode_video(test_env_bin, policy=best_model_bin_sharing.policy, factor=4,
seed=1, **kwargs_bin)
[81]:
[82]:
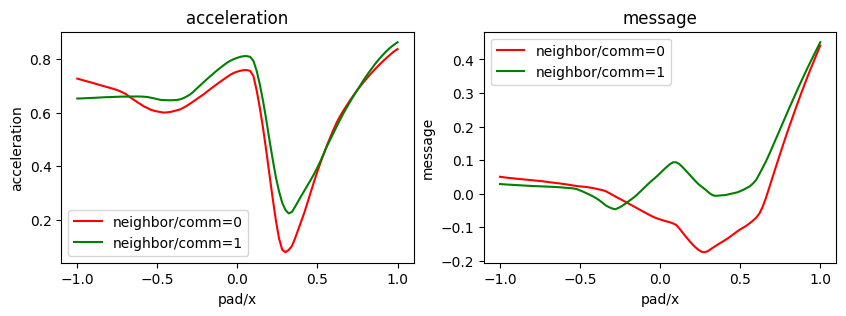
plot_policy(best_model_bin_sharing.policy,
variable={'pad/x': (-1, 1)},
fix={'ego_velocity': 0.07, 'neighbor/comm': [0, 1]},
colors=['red', 'green'],
actions={0: 'acceleration', 1: 'message'},
width=5, height=3)
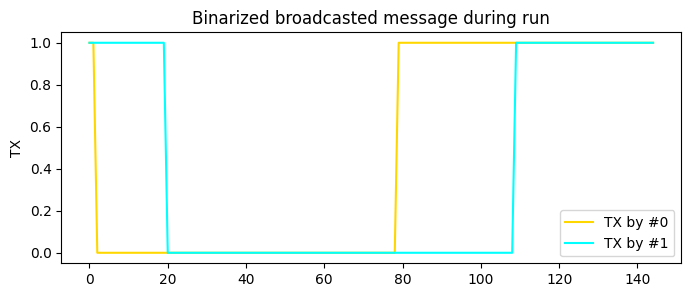
[83]:
exp = make_experiment_with_env(test_env, policy=best_model_bin_sharing.policy)
exp.add_record_probe('tx', CommProbe)
run = exp.run_once(seed=1)
plt.figure(figsize=(8, 3))
for i, color in enumerate(('gold', 'cyan')):
tx = np.asarray(run.records['tx'])[:, i, 0]
rx = (tx > 0).astype(int)
plt.plot(rx, color=color, label=f"TX by #{i}")
plt.legend()
plt.ylabel("TX")
plt.title("Binarized broadcasted message during run");
Summary#
From this (very) limited experiment, we may like to infer some general observations:
without reward sharing, it does not learn to coordinate.
with reward sharing, it learns but it is very unstable (which is not surprising)
the best models learnt with reward sharing makes sense: the agent signals its precense near the pad
there no significant advantage in sharing a float or a bit (at least with this configuration, where binarization happens during observation, but actions are continuous)
[ ]: