Using a ML policy in Navground#
We have see how to embed navground agents in Gymnasium and PettingZoo.
This notebook shows how to do the opposite, i.e., how to use a ML policy in navground.
Let us reload the same configuration and saved (random) policy as in the Gymnasium notebook.
[1]:
from navground import sim
with open('scenario.yaml') as f:
scenario = sim.load_scenario(f.read())
with open('sensor.yaml') as f:
sensor = sim.load_state_estimation(f.read())
[2]:
from navground.learning import DefaultObservationConfig, ControlActionConfig
observation_config = DefaultObservationConfig(include_target_direction=True,
include_target_distance=True)
action_config = ControlActionConfig()
We load the random policy we exported to onnx
[3]:
from navground.learning.onnx import OnnxPolicy
policy = OnnxPolicy("policy.onnx")
PolicyBehavior wraps the policy as a navground core.Behavior which can be assigned to an agent.
[4]:
from navground.learning.behaviors import PolicyBehavior
world = scenario.make_world(seed=101)
agent = world.agents[0]
agent.behavior = PolicyBehavior.clone_behavior(
agent.behavior, policy=policy, action_config=action_config, observation_config=observation_config)
agent.state_estimation = sensor
agent.color = 'red'
As an alternative, instead of using Python, we can load the modified scenario directly from YAML
[5]:
%%writefile scenario_with_policy.yaml
type: Cross
agent_margin: 0.1
side: 4
target_margin: 0.1
tolerance: 0.5
groups:
-
type: thymio
number: 1
radius: 0.1
control_period: 0.1
speed_tolerance: 0.02
color: red
kinematics:
type: 2WDiff
wheel_axis: 0.094
max_speed: 0.12
behavior:
type: Policy
include_target_direction: true
include_target_distance: true
policy_path: policy.onnx
state_estimation:
type: Discs
number: 5
range: 5.0
max_speed: 0.12
max_radius: 0.1
-
type: thymio
number: 19
radius: 0.1
control_period: 0.1
speed_tolerance: 0.02
color: gray
kinematics:
type: 2WDiff
wheel_axis: 0.094
max_speed: 0.12
behavior:
type: HL
optimal_speed: 0.12
horizon: 5.0
tau: 0.25
eta: 0.5
safety_margin: 0.1
state_estimation:
type: Bounded
range: 5.0
Overwriting scenario_with_policy.yaml
[6]:
with open('scenario_with_policy.yaml') as f:
scenario_with_policy = sim.load_scenario(f.read())
world = scenario_with_policy.make_world(seed=101)
We can now use any tool available in naground to run the simulation.
For instance, to display a video
[7]:
from navground.sim.ui.video import display_video
display_video(world, time_step=0.1, duration=60.0, factor=10.0,
display_width=400, width=400)
[7]:
or record data
[8]:
from navground.learning.probes import RewardProbe
from navground.learning.rewards import SocialReward
run = sim.ExperimentalRun(world, time_step=0.1, steps=1200, record_config=sim.RecordConfig.all(True))
# we record the reward for all agents
probe = RewardProbe.with_reward(SocialReward())
run.add_record_probe("reward", probe)
run.run()
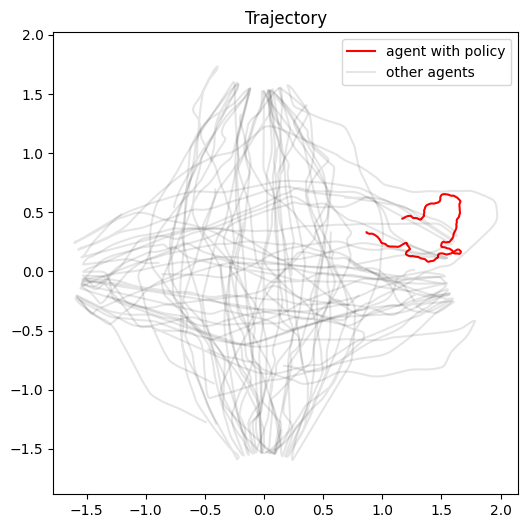
[9]:
from matplotlib import pyplot as plt
plt.figure(figsize=(6, 6))
for i in range(run.poses.shape[1]):
xs, ys = run.poses[:, i, :2].T
if i == 0:
plt.plot(xs, ys, 'r', label="agent with policy")
elif i == 1:
plt.plot(xs, ys, 'k', alpha=0.1, label="other agents")
else:
plt.plot(xs, ys, 'k', alpha=0.1)
plt.axis('equal');
plt.legend()
plt.title('Trajectory');
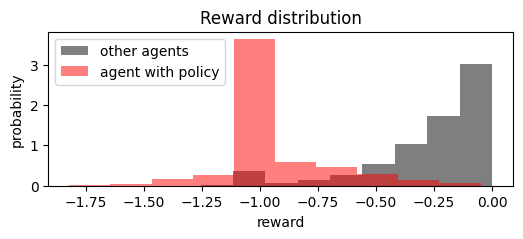
[10]:
import numpy as np
rewards = np.asarray(run.records["reward"])
plt.figure(figsize=(6, 2))
plt.hist(rewards[:, 1:].flatten(), density=True, color='black', alpha=0.5, label="other agents")
plt.hist(rewards[:, 0], density=True, color='red', alpha=0.5, label="agent with policy");
plt.legend()
plt.xlabel("reward")
plt.ylabel("probability")
plt.title('Reward distribution');
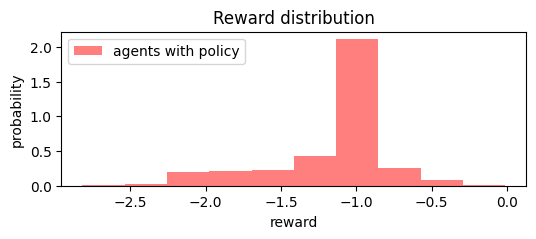
Similarly, we can increase the number of agents using the policy, from YAML, or
[11]:
world = scenario.make_world(seed=101)
for agent in world.agents:
agent.behavior = PolicyBehavior.clone_behavior(
agent.behavior, policy=policy, action_config=action_config, observation_config=observation_config)
agent.state_estimation = sensor
agent.color = 'red'
display_video(world, time_step=0.1, duration=60.0, factor=10.0, display_width=400, width=400)
[11]:
[12]:
run = sim.ExperimentalRun(world, time_step=0.1, steps=1200, record_config=sim.RecordConfig.all(True))
run.add_record_probe("reward", probe)
run.run()
rewards = np.asarray(run.records["reward"])
plt.figure(figsize=(6, 2))
plt.hist(rewards.flatten(), density=True, color='red', alpha=0.5, label="agents with policy");
plt.legend()
plt.xlabel("reward")
plt.ylabel("probability")
plt.title('Reward distribution');
[ ]: