Empty environment#
In this notebook, we showcase the whole pipeline of
defining the navground scenario
creating the Gymnasium enviroment
training a policy
evaluating in the policy
saving the policy
using the policy in navground
in a very simple navigation task where a single agent has to move towards a target direction in an empty space, which therefore require no additional sensing information.
Steps 1 and 6 play in navground, while steps 2–5 in Gymnasium.
[1]:
import warnings
warnings.filterwarnings("ignore")
Defining a scenario#
[2]:
from navground import sim
duration = 2.0
time_step = 0.1
scenario = sim.load_scenario("""
bounding_box:
min_x: -1
max_x: 3
min_y: -1
max_y: 1
groups:
-
type: thymio
number: 1
radius: 0.5
control_period: 0.1
color: blue
kinematics:
type: 2WDiff
wheel_axis: 1
max_speed: 1
behavior:
type: Dummy
task:
type: Direction
direction: [1, 0]
orientation:
sampler: uniform
from: 0
to: 6.28
""")
In this scenario, the robot starts at a random orientation and then move rightwards. As there are no obstacles to avoid, the dummy behavior performs just fine.
[3]:
from navground.sim.ui.video import display_video
world = scenario.make_world(seed=0)
display_video(world, time_step=time_step, duration=duration, display_width=300)
[3]:
Creating an enviroment#
[4]:
import gymnasium as gym
from navground.learning import ControlActionConfig, DefaultObservationConfig
from navground.learning.rewards import EfficacyReward
import navground.learning.env
env = gym.make('navground',
scenario=scenario,
action=ControlActionConfig(),
observation=DefaultObservationConfig(flat=True, include_target_direction=True),
reward=EfficacyReward(),
time_step=time_step,
max_duration=duration)
The enviroment is configured to use velocity actions (linear and angular components) normalized in [-1, 1]
[5]:
env.action_space
[5]:
Box(-1.0, 1.0, (2,), float32)
and observations which just contains the relative target direction (as unit vector)
[6]:
env.observation_space
[6]:
Box(-1.0, 1.0, (2,), float32)
Training policies#
Imitation Learning#
We train a policy using Behavior Cloning, imitating the dummy (expert) behavior
[7]:
from navground.learning.il import BC, setup_tqdm
setup_tqdm()
bc = BC(env=env, policy_kwargs={'net_arch': [8, 8]})
bc.collect_runs(1_000)
bc.learn(n_epochs=8, progress_bar=True)
bc.save("BC/model")
Reinforcement Learning#
We train a policy using SAC for 20000 steps, which is the same as 1000 runs.
[8]:
from stable_baselines3 import SAC
sac = SAC("MlpPolicy", env, verbose=0, policy_kwargs={'net_arch': [8, 8]})
sac.learn(total_timesteps=20_000, progress_bar=True)
sac.save("SAC/model")
Evaluating the policies#
The maximal efficacy is 1, therefore the maximal cumulated reward is duration / time_step * 1
[9]:
# Equivalent to
# from stable_baselines3.common.evaluation import evaluate_policy
# but supports model using the info dict for prediction
from navground.learning.evaluation import evaluate_policy
# we could also run
# from navground.learning.evaluation import evaluate
# expert_reward_mean, expert_reward_std_dev = evaluate(env, n_eval_episodes=1_000)
max_reward = duration / time_step
expert_reward_mean, expert_reward_std_dev = evaluate_policy(env.unwrapped.policy, env, n_eval_episodes=1_000)
expert_reward_mean /= max_reward
expert_reward_std_dev /= max_reward
print(f"Dummy:\treward = {expert_reward_mean:.1%} ± {expert_reward_std_dev:.1%}")
Dummy: reward = 54.9% ± 25.9%
The policies perform similarly to the expert
[10]:
from stable_baselines3.common.env_util import make_vec_env
# uses random seed
test_env = make_vec_env('navground', env_kwargs=env.spec.kwargs)
for model in (bc, sac):
reward_mean, reward_std_dev = evaluate_policy(model.policy, test_env, n_eval_episodes=1_000)
reward_mean /= max_reward
reward_std_dev /= max_reward
name = model.__class__.__name__
print(f"{name}:\treward = {reward_mean:.1%} ± {reward_std_dev:.1%}")
BC: reward = 60.3% ± 22.9%
SAC: reward = 57.5% ± 23.6%
Let’s also check which mapping between target direction and velocity commands has been learned. Let’s start by computing the expert’s mapping:
[11]:
from navground import core
import numpy as np
world = scenario.make_world()
world._prepare()
behavior = world.agents[0].behavior
angles = np.linspace(0, 2 * np.pi, 360)
dirs = np.array([core.unit(a) for a in angles])
expert_cmds = []
for angle in angles:
behavior.orientation = -angle
cmd = behavior.compute_cmd(0.1)
expert_cmds.append([cmd.velocity[0], cmd.angular_speed])
expert_cmds = np.asarray(expert_cmds)
Then we can evaluate the policies
[12]:
def get_cmds(model):
cmds, _ = model.policy.predict(dirs)
cmds[:, 0] *= behavior.max_speed
cmds[:, 1] *= behavior.max_angular_speed
return cmds
bc_cmds = get_cmds(bc)
sac_cmds = get_cmds(sac)
and compare them
[13]:
from matplotlib import pyplot as plt
fig, axs = plt.subplots(ncols=2, figsize=(15, 4))
for i, (ax, name) in enumerate(zip(axs, ('Linear', 'Angular'))):
ax.plot(angles, expert_cmds[:, i], label="Expert")
ax.plot(angles, bc_cmds[:, i], label="BC")
ax.plot(angles, sac_cmds[:, i], label="SAC", alpha=0.75)
ax.set_xlabel("relative target orientation")
ax.set_title(f'{name} speed')
plt.legend()
[13]:
<matplotlib.legend.Legend at 0x13eb875c0>
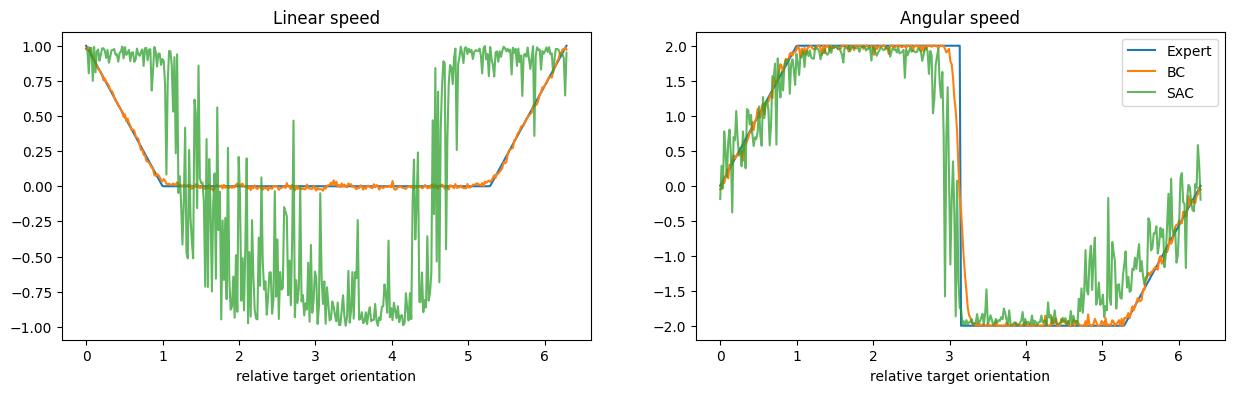
We note that the SAC outputs very noisy linear speeds. This happens because the commands outputted by the policy, before being actuated, are filtered by the kinematics of the agents, which return the nearest feasible command. In this case, for large enough angular speeds, the kinematics nullifies the linear components to respect the constrains due to the limited wheel speeds. Basically, in this case, it would be enough to learn to control angular speed, and keep linear speed maximal.
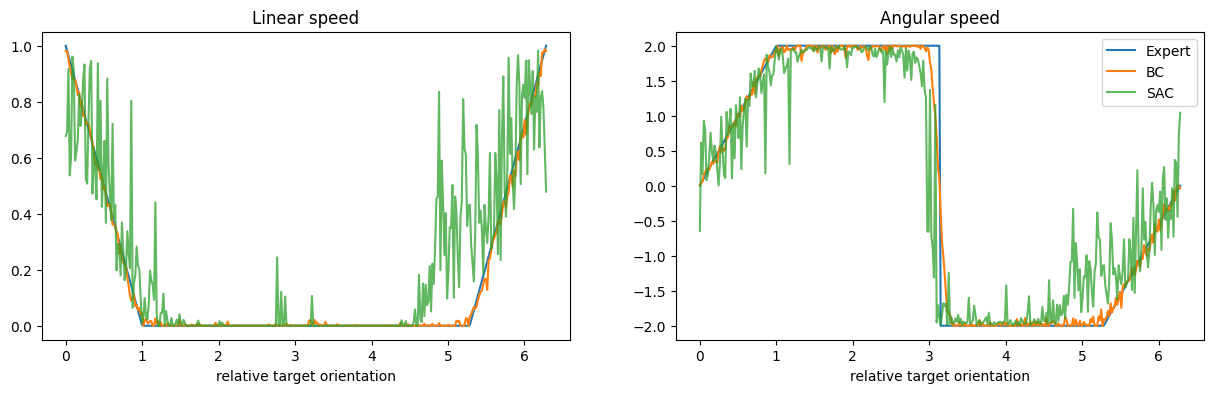
After we compute feasible commands
[14]:
kinematics = world.agents[0].kinematics
def get_feasible_cmds(model):
cmds, _ = model.policy.predict(dirs)
twists = [kinematics.feasible(core.Twist2((cmd[0] * behavior.max_speed, 0), cmd[1] * behavior.max_angular_speed)) for cmd in cmds]
return np.asarray([[twist.velocity[0], twist.angular_speed] for twist in twists])
bc_feasible_cmds = get_feasible_cmds(bc)
sac_feasible_cmds = get_feasible_cmds(sac)
the plots are more interpretable, altough the SAC policy remains more noisy
[15]:
from matplotlib import pyplot as plt
fig, axs = plt.subplots(ncols=2, figsize=(15, 4))
for i, (ax, name) in enumerate(zip(axs, ('Linear', 'Angular'))):
ax.plot(angles, expert_cmds[:, i], label="Expert")
ax.plot(angles, bc_feasible_cmds[:, i], label="BC")
ax.plot(angles, sac_feasible_cmds[:, i], label="SAC", alpha=0.75)
ax.set_xlabel("relative target orientation")
ax.set_title(f'{name} speed')
plt.legend()
[15]:
<matplotlib.legend.Legend at 0x13f0d2b70>
Exporting the trained policy#
We have already saved the trained models, which we can later reload with
from navground_learning.il import BC
from stable_baselines3 import SAC
bc = BC.load("BC.zip")
sac = SAC.load("SAC.zip")
We now export to onnx, along with YAML files describing the behavior and sensor (if any) to use them.
[16]:
from navground.learning import io
for model in (bc, sac):
name = model.__class__.__name__
io.export_policy_as_behavior(path=name, env=env, policy=model.policy)
[17]:
ls BC
behavior.yaml model.zip policy.onnx