Introduction
Humans use pointing gestures extensively when they communicate with other nearby humans, mainly to indicate positions, directions or objects in the shared space. This page summarizes recent research at IDSIA, exploring methods to achieve the same interaction modality using a wearable bracelet as a sensor; the method is applied to various robot systems, including drones and large conveyor-belt plants used for logistics.
Interacting with a simulated RoboMaster
The video shows preliminary results on pointing-based interaction for collaborative pick&place using two simulated DJI RoboMasters: one robot moves objects on command, the other robot provides visual feedback projecting lights where the user is pointing. The video is speeded up 8 times.
Publications
Interacting with a Conveyor Belt in Virtual Reality using Pointing Gestures
J. Guzzi, G. Abbate, A. Paolillo, and A. Giusti
in Proceedings of the 2022 ACM/IEEE International Conference on Human-Robot Interaction, pp. 1194–1195, 2022
@inproceedings{10.5555/3523760.3523971,
author = {Guzzi, J\'{e}r\^{o}me and Abbate, Gabriele and Paolillo, Antonio and Giusti, Alessandro},
title = {Interacting with a Conveyor Belt in Virtual Reality Using Pointing Gestures},
year = {2022},
publisher = {IEEE Press},
abstract = {We present an interactive demonstration where users are immersed in a virtual reality simulation of a logistic automation system. Using pointing gestures sensed by wrist-worn inertial measurement unit, users select defective packages transported on conveyor belts. The demonstration allows users to experience a novel way to interact with automation systems, and shows an effective application of virtual reality for human-robot interaction studies.},
booktitle = {Proceedings of the 2022 ACM/IEEE International Conference on Human-Robot Interaction},
pages = {1194–1195},
numpages = {2},
keywords = {pointing, human-machine interaction, virtual reality, conveyor system},
location = {Sapporo, Hokkaido, Japan},
series = {HRI '22}
}
Abstract
We present an interactive demonstration where users are immersed in a virtual reality simulation of a logistic automation system. Using pointing gestures sensed by wrist-worn inertial measurement unit, users select defective packages transported on conveyor belts. The demonstration allows users to experience a novel way to interact with automation systems, and shows an effective application of virtual reality for human-robot interaction studies.
PointIt: A ROS Toolkit for Interacting with Co-located Robots using Pointing Gestures
G. Abbate, A. Giusti, A. Paolillo, B. Gromov, L. Gambardella, A. Rizzoli, and J. Guzzi
in Proceedings of the 2022 ACM/IEEE International Conference on Human-Robot Interaction, pp. 608–612, 2022
@inproceedings{10.5555/3523760.3523840,
author = {Abbate, Gabriele and Giusti, Alessandro and Paolillo, Antonio and Gromov, Boris and Gambardella, Luca and Rizzoli, Andrea-Emilio and Guzzi, J\'{e}r\^{o}me},
title = {PointIt: A ROS Toolkit for Interacting with Co-Located Robots Using Pointing Gestures},
year = {2022},
publisher = {IEEE Press},
abstract = {We introduce PointIt, a toolkit for the Robot Operating System (ROS2) to build human-robot interfaces based on pointing gestures sensed by a wrist-worn Inertial Measurement Unit, such as a smartwatch. We release the software as open-source with MIT license; docker images and exhaustive instructions simplify its usage in simulated and real-world deployments.},
booktitle = {Proceedings of the 2022 ACM/IEEE International Conference on Human-Robot Interaction},
pages = {608–612},
numpages = {5},
keywords = {pointing gesture, ros, human robot interaction, ambient intelligence},
location = {Sapporo, Hokkaido, Japan},
series = {HRI '22}
}
Abstract
We introduce PointIt, a toolkit for the Robot Operating System (ROS2) to build human-robot interfaces based on pointing gestures sensed by a wrist-worn Inertial Measurement Unit, such as a smartwatch. We release the software as open-source with MIT license; docker images and exhaustive instructions simplify its usage in simulated and real-world deployments.
Selecting Objects on Conveyor Belts Using Pointing Gestures Sensed by a Wrist-worn Inertial Measurement Unit
G. Abbate, A. Giusti, A. Paolillo, L. Gambardella, A. Rizzoli, and J. Guzzi
Abstract
We introduce an intuitive pointing-based interface to select objects moving on a system of conveyor belts. The interface has minimal sensing requirements, as the operator only needs to wear an Inertial Measurement Unit on the wrist (e.g., a smartwatch). LED strips provide the required visual feedback to precisely point to the objects and select them. We test the proposed approach in three environments of different complexity. Experiments compare our approach with a graphical interface where the user clicks on packages with a mouse; quantitative results show that our interface compares favorably, especially in difficult scenarios involving many packages moving fast.
Pointing at Moving Robots: Detecting Events from Wrist IMU Data
G. Abbate, B. Gromov, L. Gambardella, and A. Giusti
in 2021 IEEE International Conference on Robotics and Automation (ICRA), pp. 3604-3611, 2021
@INPROCEEDINGS{9561387,
author={Abbate, Gabriele and Gromov, Boris and Gambardella, Luca M. and Giusti, Alessandro},
booktitle={2021 IEEE International Conference on Robotics and Automation (ICRA)},
title={Pointing at Moving Robots: Detecting Events from Wrist IMU Data},
year={2021},
volume={},
number={},
pages={3604-3611},
doi={10.1109/ICRA48506.2021.9561387}}
Abstract
We propose a practical approach for detecting the event that a human wearing an IMU-equipped bracelet points at a moving robot; the approach uses a learned classifier to verify if the robot motion (as measured by its odometry) matches the wrist motion, and does not require that the relative pose of the operator and robot is known in advance. To train the model and validate the system, we collect datasets containing hundreds of real-world pointing events. Extensive experiments quantify the performance of the classifiers and relevant metrics of the resulting detectors; the approach is implemented in a real-world demonstrator that allows users to land quadrotors by pointing at them.
Intuitive 3D Control of a Quadrotor in User Proximity with Pointing Gestures
B. Gromov, J. Guzzi, L. Gambardella, and A. Giusti
in 2020 IEEE International Conference on Robotics and Automation (ICRA), 2020, pp. 5964-5971
@INPROCEEDINGS{gromov2020intuitive,
author={Gromov, Boris and Guzzi, Jérôme and Gambardella, Luca M. and Giusti, Alessandro},
booktitle={2020 IEEE International Conference on Robotics and Automation (ICRA)},
title={Intuitive 3D Control of a Quadrotor in User Proximity with Pointing Gestures},
year={2020},
volume={},
number={},
pages={5964-5971},
doi={10.1109/ICRA40945.2020.9196654}
}
Abstract
We present an approach for controlling the position of a quadrotor in 3D space using pointing gestures; the task is difficult because it is in general ambiguous to infer where, along the pointing ray, the robot should go. We propose and validate a pragmatic solution based on a push button acting as a simple additional input device which switches between different virtual workspace surfaces. Results of a study involving ten subjects show that the approach performs well on a challenging 3D piloting task, where it compares favorably with joystick control.
Guiding Quadrotor Landing with Pointing Gestures
B. Gromov, L. Gambardella, and A. Giusti
in Human-Friendly Robotics 2019, Cham, 2020, pp. 1–14
@inproceedings{gromov2020guiding,
author = {Gromov, Boris and Gambardella, Luca and Giusti, Alessandro},
editor = {Ferraguti, Federica and Villani, Valeria and Sabattini, Lorenzo and Bonf{\`e}, Marcello},
title = {Guiding Quadrotor Landing with Pointing Gestures},
booktitle = {Human-Friendly Robotics 2019},
year = {2020},
month = feb,
publisher = {Springer International Publishing},
address = {Cham},
pages = {1--14},
isbn = {978-3-030-42026-0},
doi = {10.1007/978-3-030-42026-0_1},
}
Abstract
We present a system which allows an operator to land a quadrotor on a precise spot in its proximity by only using pointing gestures; the system has very limited requirements in terms of robot capabilities, relies on an unobtrusive bracelet-like device worn by the operator, and depends on proven, field-ready technologies. During the interaction, the robot continuously provides feedback by controlling its position in real time: such feedback has a fundamental role in mitigating sensing inaccuracies and improving user experience. We report a user study where our approach compares well with a standard joystick-based controller in terms of intuitiveness (amount of training required), landing spot accuracy, and efficiency.
Proximity Human-Robot Interaction Using Pointing Gestures and a Wrist-mounted IMU
B. Gromov, G. Abbate, L. Gambardella, and A. Giusti
in 2019 IEEE International Conference on Robotics and Automation (ICRA), 2019, pp. 8084–8091
@inproceedings{gromov2019proximity,
author = {Gromov, Boris and Abbate, Gabriele and Gambardella, Luca and Giusti, Alessandro},
title = {Proximity Human-Robot Interaction Using Pointing Gestures and a Wrist-mounted {IMU}},
booktitle = {2019 IEEE International Conference on Robotics and Automation (ICRA)},
pages = {8084-8091},
year = {2019},
month = may,
doi = {10.1109/ICRA.2019.8794399},
issn = {2577-087X},
video = {https://youtu.be/hyh_5A4RXZY},
}
Abstract
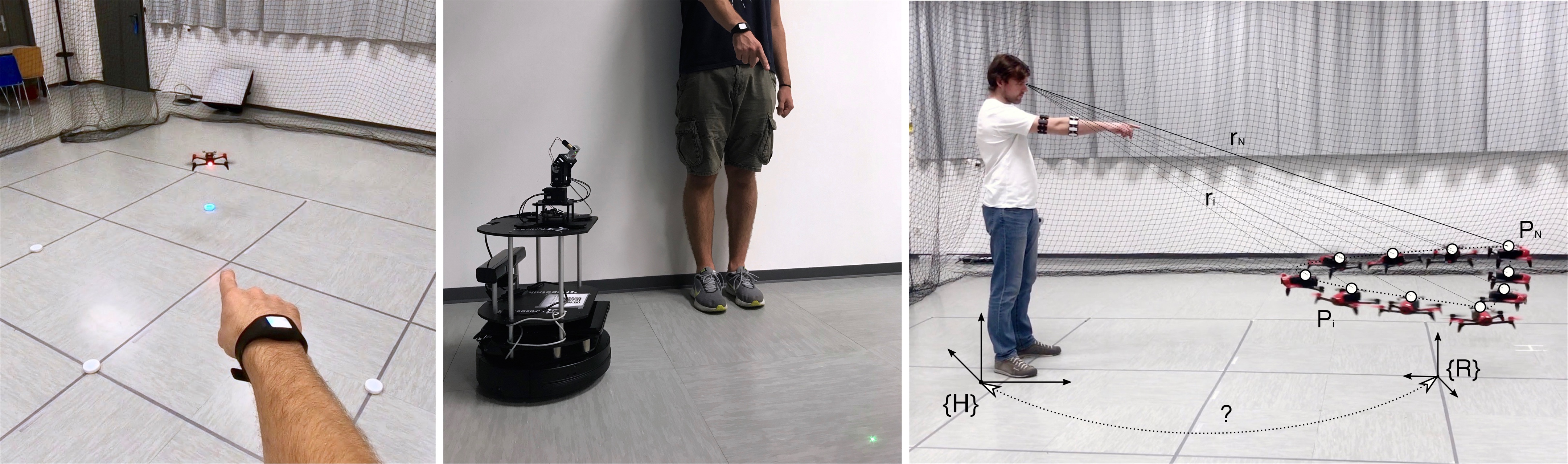
We present a system for interaction between colocated humans and mobile robots, which uses pointing gestures sensed by a wrist-mounted IMU. The operator begins by pointing, for a short time, at a moving robot. The system thus simultaneously determines: that the operator wants to interact; the robot they want to interact with; and the relative pose among the two. Then, the system can reconstruct pointed locations in the robot’s own reference frame, and provide real-time feedback about them so that the user can adapt to misalignments. We discuss the challenges to be solved to implement such a system and propose practical solutions, including variants for fast flying robots and slow ground robots. We report different experiments with real robots and untrained users, validating the individual components and the system as a whole.
Video: Pointing Gestures for Proximity Interaction
B. Gromov, J. Guzzi, G. Abbate, L. Gambardella, and A. Giusti
in HRI ’19: 2019 ACM/IEEE International Conference on Human-Robot Interaction, March 11–14, 2019, Daegu, Rep. of Korea, 2019
{kind=link}
@inproceedings{gromov2019video,
author = {Gromov, Boris and Guzzi, J{\'e}r{\^o}me and Abbate, Gabriele and Gambardella, Luca and Giusti, Alessandro},
title = {Video: Pointing Gestures for Proximity Interaction},
booktitle = {HRI~'19: 2019 ACM/IEEE International Conference on Human-Robot Interaction, March 11--14, 2019, Daegu, Rep. of Korea},
conference = {2019 ACM/IEEE International Conference on Human-Robot Interaction},
location = {Daegu, Rep. of Korea},
year = {2019},
month = mar,
video = {https://youtu.be/yafy-HZMk_U},
doi = {10.1109/HRI.2019.8673020},
}
Abstract
We demonstrate a system to control robots in the users proximity with pointing gestures-a natural device that people use all the time to communicate with each other. Our setup consists of a miniature quadrotor Crazyflie 2.0, a wearable inertial measurement unit MetaWearR+ mounted on the user's wrist, and a laptop as the ground control station.
Demo: Pointing Gestures for Proximity Interaction
B. Gromov, J. Guzzi, L. Gambardella, and A. Giusti
in HRI ’19: 2019 ACM/IEEE International Conference on Human-Robot Interaction, March 11–14, 2019, Daegu, Rep. of Korea, 2019
{kind=link}
@inproceedings{gromov2019demo,
author = {Gromov, Boris and Guzzi, J{\'e}r{\^o}me and Gambardella, Luca and Giusti, Alessandro},
title = {Demo: Pointing Gestures for Proximity Interaction},
booktitle = {HRI~'19: 2019 ACM/IEEE International Conference on Human-Robot Interaction, March 11--14, 2019, Daegu, Rep. of Korea},
conference = {2019 ACM/IEEE International Conference on Human-Robot Interaction},
location = {Daegu, Rep. of Korea},
year = {2019},
month = mar,
doi = {10.1109/HRI.2019.8673329},
}
Abstract
We demonstrate a system to control robots in the users proximity with pointing gestures-a natural device that people use all the time to communicate with each other. Our setup consists of a miniature quadrotor Crazyflie 2.0, a wearable inertial measurement unit MetaWearR+ mounted on the user's wrist, and a laptop as the ground control station.
Robot Identification and Localization with Pointing Gestures
B. Gromov, L. Gambardella, and A. Giusti
in 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018, pp. 3921–3928
@inproceedings{gromov2018robot,
author = {Gromov, Boris and Gambardella, Luca and Giusti, Alessandro},
title = {Robot Identification and Localization with Pointing Gestures},
booktitle = {2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year = {2018},
pages = {3921-3928},
keywords = {Robot sensing systems;Robot kinematics;Solid modeling;Manipulators;Drones;Three-dimensional displays},
doi = {10.1109/IROS.2018.8594174},
issn = {2153-0866},
month = oct,
video = {https://youtu.be/VaQ3aZBf_uE},
}
Abstract
We propose a novel approach to establish the relative pose of a mobile robot with respect to an operator that wants to interact with it; we focus on scenarios in which the robot is in the same environment as the operator, and is visible to them. The approach is based on comparing the trajectory of the robot, which is known in the robot’s odometry frame, to the motion of the arm of the operator, who, for a short time, keeps pointing at the robot they want to interact with. In multi-robot scenarios, the same approach can be used to simultaneously identify which robot the operator wants to interact with. The main advantage over alternatives is that our system only relies on the robot’s odometry, on a wearable inertial measurement unit (IMU), and, crucially, on the operator’s own perception. We experimentally show the feasibility of our approach using real-world robots.
Video: Landing a Drone with Pointing Gestures
B. Gromov, L. Gambardella, and A. Giusti
in HRI ’18 Companion: 2018 ACM/IEEE International Conference on Human-Robot Interaction Companion, March 5–8, 2018, Chicago, IL, USA, 2018
@inproceedings{gromov2018video,
author = {Gromov, Boris and Gambardella, Luca and Giusti, Alessandro},
title = {Video: Landing a Drone with Pointing Gestures},
booktitle = {HRI~'18 Companion: 2018 ACM/IEEE International Conference on Human-Robot Interaction Companion, March 5--8, 2018, Chicago, IL, USA},
conference = {2018 ACM/IEEE International Conference on Human-Robot Interaction Companion},
doi = {10.1145/3173386.3177530},
isbn = {978-1-4503-5615-2/18/03},
location = {Chicago, IL, USA},
year = {2018},
month = mar,
acmid = {3177530},
publisher = {ACM},
video = {https://youtu.be/jpG8Jsmth2Y},
}
Abstract
We demonstrate an intuitive gesture-based interface for manually guiding a drone to land on a precise spot. Using unobtrusive wearable sensors, an operator can quickly and accurately maneuver and land the drone after very little training; a preliminary user study on 5 subjects shows that the system compares favorably with a traditional joystick interface.
Learning to detect pointing gestures from wearable IMUs
D. Broggini, B. Gromov, L. M. Gambardella, and A. Giusti
in Proceedings of Thirty-Second AAAI Conference on Artificial Intelligence, February 2-7, 2018, New Orleans, Louisiana, USA, 2018
Abstract
We propose a learning-based system for detecting when a user performs a pointing gesture, using data acquired from IMU sensors, by means of a 1D convolutional neural network. We quantitatively evaluate the resulting detection accuracy, and discuss an application to a human-robot interaction task where pointing gestures are used to guide a quadrotor landing.
Wearable multi-modal interface for human multi-robot interaction
B. Gromov, L. M. Gambardella, and G. A. Di Caro
in Safety, Security, and Rescue Robotics (SSRR), 2016 IEEE International Symposium on, 2016, pp. 240–245
@inproceedings{gromov2016wearable,
title = {Wearable multi-modal interface for human multi-robot interaction},
author = {Gromov, Boris and Gambardella, Luca M and Di Caro, Gianni A},
booktitle = {Safety, Security, and Rescue Robotics (SSRR), 2016 IEEE International Symposium on},
pages = {240--245},
year = {2016},
organization = {IEEE},
doi = {10.1109/SSRR.2016.7784305},
video = {https://youtu.be/FWMCxARQYhY}
}
Abstract
A complete prototype for multi-modal interaction between humans and multi-robot systems is described. The application focus is on search and rescue missions. From the human-side, speech and arm and hand gestures are combined to select, localize, and communicate task requests and spatial information to one or more robots in the field. From the robot side, LEDs and vocal messages are used to provide feedback to the human. The robots also employ coordinated autonomy to implement group behaviors for mixed initiative interaction. The system has been tested with different robotic platforms based on a number of different useful interaction patterns.