World attributes#
In this tutorial, we learn how to use world attributes to write a behavior modulation. Note that we could have used Python variables direcly, e.g.
world.side_length = 1.0
instead of
world.set("side_length", 1.0)
with the same effect. Yet, using attribute allow us to
save/restore them from YAML
read/write them from C++.
This way, we could move some the classes (e.g., the modulation, the state estimation and/or the scenario) to C++.
In this scenario, a robot moves on a checkboard. The parameters of the checkboard cells (size, number, and color) are exposed as properties. When initializing a world, the scenario write the same parameter (which may be sampled from some distribution) as attribute of the world.
[1]:
from navground import sim, core
class MyScenario(sim.Scenario, name="Checkboard"):
def __init__(self, number_of_cells: int = 8, side_length: float = 1.0,
color_1: tuple[float, float, float] = (0.25, 0.25, 0.25),
color_2: tuple[float, float, float] = (0.75, 0.75, 0.75)):
sim.Scenario.__init__(self)
self._side_length = side_length
self._number_of_cells = number_of_cells
self._color_1 = color_1
self._color_2 = color_2
@property
@sim.register(1.0, "Side length")
def side_length(self) -> float:
return self._side_length
@side_length.setter
def side_length(self, value: float) -> None:
if value <= 0:
raise ValueError("Side length must be stricly positive")
self._side_length = value
@property
@sim.register(8, "# of cells")
def number_of_cells(self) -> int:
return self._number_of_cells
@number_of_cells.setter
def number_of_cells(self, value: int) -> None:
self._number_of_cells = max(1, value)
@property
@sim.register([0, 0, 0], "First color")
def color_1(self) -> list[float]:
return self._color_1
@color_1.setter
def color_1(self, value: list[float]) -> None:
if len(value) == 3:
self._color_1 = value
@property
@sim.register([0, 0, 0], "First color")
def color_2(self) -> list[float]:
return self._color_2
@color_2.setter
def color_2(self, value: list[float]) -> None:
if len(value) == 3:
self._color_2 = value
def init_world(self, world: sim.World, seed: int | None = None) -> None:
super().init_world(world, seed=seed)
world.bounding_box = sim.BoundingBox(0, self.side_length * self.number_of_cells,
0, self.side_length * self.number_of_cells)
We read the world attributes to render the checkboard
[2]:
from navground.sim.notebook import display_in_notebook
from navground.sim.ui.to_svg import svg_color
def checkboard(world: sim.World) -> str:
if not (world.has("side_length") and world.has("side_length") and world.has("side_length")):
return ''
s = ''
l = world.get("side_length")
n = world.get("number_of_cells")
color_1 = svg_color(*world.get("color_1"))
color_2 = svg_color(*world.get("color_2"))
for i in range(n):
for j in range(n):
color = color_1 if (i + j) % 2 else color_2
s += f'<rect x="{i * l}" y="{j * l}" width="{l}" height="{l}" fill="{color}" />'
return s
[3]:
scenario = MyScenario(side_length=0.125, color_1=(0.25, 0.0, 0.125))
world = scenario.make_world(seed=0)
# This copies all scenario properties as world attributes
scenario.set_attributes(world)
# We could have done it manually using
# for k in scenario.properties:
# world.set(k, scenario.get(k))
robot = sim.Agent()
robot.type = 'thymio'
robot.radius = 0.1
robot.color = 'gold'
robot.pose = core.Pose2((0.5, 0.6), 0.2)
world.add_agent(robot)
display_in_notebook(world, background_extras=[checkboard])
[3]:

Attributes are also included in the YAML representation
[4]:
yaml = world.dump()
print(yaml)
obstacles:
[]
walls:
[]
agents:
- position:
- 0.5
- 0.6
orientation: 0.2
velocity:
- 0
- 0
angular_speed: 0
radius: 0.1
control_period: 0
speed_tolerance: 0.01
angular_speed_tolerance: 0.01
type: thymio
color: gold
id: 0
uid: 0
bounding_box:
min_x: 0
min_y: 0
max_x: 1
max_y: 1
attributes:
color_1:
value:
- 0.25
- 0
- 0.125
type: "[float]"
color_2:
value:
- 0.75
- 0.75
- 0.75
type: "[float]"
number_of_cells:
value: 8
type: int
side_length:
value: 0.125
type: float
and therefore loaded/copied:
[5]:
import copy
print(f'Original world attributes:\n{world.attributes}\n')
world1 = copy.copy(world)
print(f'Copied world attributes:\n{world1.attributes}\n')
world2 = sim.World.load(yaml)
print(f'Loaded world attributes:\n{world2.attributes}\n')
Original world attributes:
{'color_1': [0.25, 0.0, 0.125], 'color_2': [0.75, 0.75, 0.75], 'number_of_cells': 8, 'side_length': 0.125}
Copied world attributes:
{'color_1': [0.25, 0.0, 0.125], 'color_2': [0.75, 0.75, 0.75], 'number_of_cells': 8, 'side_length': 0.125}
Loaded world attributes:
{'color_1': [0.25, 0.0, 0.125], 'color_2': [0.75, 0.75, 0.75], 'number_of_cells': 8, 'side_length': 0.125}
We use the same world attributes to define a sensor that reads the color below the robot
[6]:
import math
def checkboard_color_at(position, number_of_cells, side_length, color_1, color_2):
if position[0] > number_of_cells * side_length or position[0] < 0:
return (0, 0, 0)
if position[1] > number_of_cells * side_length or position[1] < 0:
return (0, 0, 0)
i = math.floor(position[0] / side_length)
j = math.floor(position[1] / side_length)
if (i + j) % 2:
return color_1
return color_2
class FloorSensor(sim.Sensor, name="FloorColor"):
def update(self, agent: sim.Agent, world: sim.World,
state: core.EnvironmentState) -> None:
if not isinstance(state, core.SensingState):
return
color = checkboard_color_at(agent.position, world.get("number_of_cells"), world.get("side_length"),
world.get("color_1"), world.get("color_2"))
state.get_buffer(f'{self.name}/color').data = np.asarray(color)
def get_description(self) -> dict[str, core.BufferDescription]:
desc = core.BufferDescription([3], float, 0.0, 1.0)
return {f'{self.name}/color': desc}
To test the whole, we define a modulation that slows down the robot when on a dark spot.
[7]:
import numpy as np
class SlowDownOnBlackModulation(core.BehaviorModulation, name="SlowDownOnDark"):
def pre(self, behavior: core.Behavior, time_step: float):
color = behavior.environment_state.buffers['/color'].data
intensity = np.mean(color)
self._optimal_speed = behavior.optimal_speed
behavior.optimal_speed = intensity * behavior.optimal_speed
def post(self, behavior: core.Behavior, time_step: float, cmd: core.Twist2) -> core.Twist2:
behavior.optimal_speed = self._optimal_speed
return cmd
Let us run it once
[8]:
scenario = sim.load_scenario("""
type: Checkboard
side_length:
sampler: uniform
from: 0.25
to: 1.0
number_of_cells: 10
number: 100
color: [0.2, 0.4, 0.3]
color: [0.6, 0.7, 0.8]
groups:
- number: 1
type: thymio
color: gold
radius: 0.1
position: [1.13, 0.71]
kinematics:
type: 2WDiff
max_speed: 0.14
wheel_axis: 0.09
behavior:
type: Dummy
environment: Sensing
modulations:
- type: SlowDownOnDark
state_estimation:
type: FloorColor
name: floor
task:
type: Waypoints
waypoints: [[0.75, 1.5], [5.3, 2.2], [1.5, 4.9]]
tolerance: 0.02
""")
[9]:
from navground.sim.ui.video import display_video
world = scenario.make_world()
scenario.set_attributes(world)
display_video(world, time_step=0.1, duration=120, factor=20,
background_extras=[checkboard]
)
[9]:
Finally, we perform some experiments, sampling the cell size uniformly.
[10]:
experiment = sim.Experiment(time_step=0.1, steps=100)
experiment.scenario = scenario
experiment.record_config.efficacy = True
experiment.run(number_of_runs=1000)
The sampled checkboard configuration are included in the initial state of the world saved by the experiment, and also accessible through the API.
[11]:
experiment.runs[50].world.attributes
[11]:
{'color_1': [0.25, 0.25, 0.25],
'color_2': [0.75, 0.75, 0.75],
'number_of_cells': 10,
'side_length': 0.620951235294342}
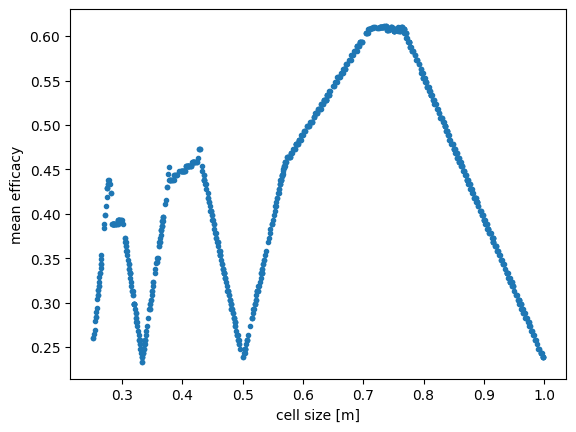
which we can use to compute the (not very interesting) correlation between cell size and mean efficacy
[12]:
from matplotlib import pyplot as plt
sizes = [run.world.get('side_length') for run in experiment.runs.values()]
efficacy = [np.mean(run.efficacy) for run in experiment.runs.values()]
plt.plot(sizes, efficacy, '.')
plt.xlabel('cell size [m]')
plt.ylabel('mean efficacy');
[ ]: