Visualize a simulation#
In this tutorial you will learn how to display a simulated world as SVG or HTML in a notebook cell and how to keep the visualization synchronized.
Let’s start by definining an experiment with different types of agents
[1]:
from navground import sim, core
yaml = """
type: Cross
agent_margin: 0.1
side: 4
target_margin: 0.1
tolerance: 0.5
groups:
-
type: thymio
number: 10
radius: 0.08
color: "#e6e6e6"
kinematics:
type: 2WDiff
wheel_axis: 0.094
max_speed: 0.166
behavior:
type: HL
optimal_speed: 0.12
horizon: 5.0
safety_margin: 0.02
barrier_angle: 1.4
state_estimation:
type: Bounded
range: 5.0
-
type: agent
number: 10
radius:
sampler: uniform
from: 0.05
to: 0.2
kinematics:
type: Ahead
max_speed: 0.3
max_angular_speed: 1.0
color: "gold"
behavior:
type: HL
optimal_speed: 0.15
horizon: 5.0
safety_margin: 0.1
barrier_angle: 1.4
state_estimation:
type: Bounded
range: 5.0
"""
scenario = sim.load_scenario(yaml)
from which we initialize a world with a random seed:
[2]:
import random
world = sim.World()
scenario.init_world(world, seed=random.randint(0, 2**31))
We can display the initial world state as a SVG
[3]:
from IPython.display import SVG
from navground.sim.ui import svg_for_world
SVG(data=svg_for_world(world, width=300, bounds=((-2, -2), (2, 2))))
[3]:

or as a HTML embedding the same SVG drawing
[4]:
from IPython.display import HTML
from navground.sim.ui import html_for_world
data = html_for_world(world, width=300, bounds=((-2, -2), (2, 2)))
HTML(data=data)
[4]:
which we can also save to a file
[5]:
with open('test.html', 'w') as f:
f.write(data)
and reload from that file
[6]:
HTML(filename="test.html")
[6]:
We can also render it as a png, pdf
[7]:
from navground.sim.ui.render import png_for_world
from IPython.display import Image
Image(data=png_for_world(world), width=300)
[7]:
or raw image.
[8]:
from navground.sim.ui.render import image_for_world
image = image_for_world(world, width=300, bounds=((-2.1, -2.1), (2.1, 2.1)))
image.shape, image.dtype
[8]:
((300, 300, 3), dtype('uint8'))
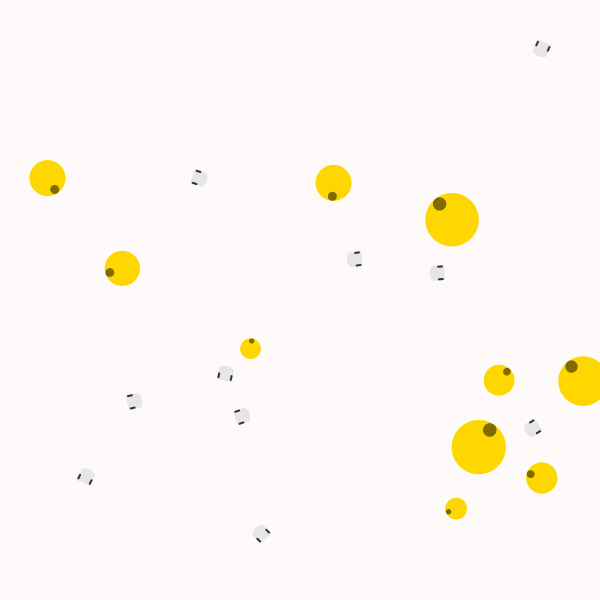
Let’s run a simulation for a while and then visualize the new world state
[9]:
world.run(steps=100, time_step=0.1)
SVG(data=svg_for_world(world, width=300, bounds=((-2, -2), (2, 2))))
[9]:

We can color the robot by their estimated time to the target.
Let’s start by defining a function that maps a value in interval [a, b] to a color, using one of matplotlib color maps
[10]:
import matplotlib.colors as colors
import matplotlib.cm as cmx
def linear_map(a, b, cmap):
c = cmx.ScalarMappable(norm=colors.Normalize(vmin=a, vmax=b), cmap=cmap)
def f(v):
r, g, b, _ = c.to_rgba(v)
return f"#{int(r * 255):02x}{int(g * 255):02x}{int(b * 255):02x}"
return f
Then we decorate the SVG fill with colors generate from the estimated times until arrival (green=almost arrived, red=still far away). Decorations are functions that map an entiry (agents, obstacles, …) to a dictionary of SVG [style] attributes.
[11]:
fill_map = linear_map(0, 40.0, cmap=cmx.RdYlGn_r)
def decorate(agent):
t = agent.behavior.estimate_time_until_target_satisfied()
return {"fill": fill_map(t)}
SVG(data=svg_for_world(world, width=300, decorate=decorate, bounds=((-2, -2), (2, 2))))
[11]:

We can also update the same view. For this we need to instantiate an empty canvas
[12]:
from navground.sim.notebook import notebook_view
notebook_view(width=300, port=8002)
[12]:
and a WebUI to keep it in sync via websockets
[13]:
from navground.sim.ui import WebUI
ui = WebUI(port=8002)
await ui.prepare()
[13]:
True
Let’s now populate the view withe the current simulation state
[14]:
await ui.init(world)
We can change attributes on the fly. For example, let’s color all large agents in red
[15]:
for a in world.agents:
if a.radius > 0.15:
await ui.set(a, style="fill:red")
Let’s run the simulation futher and update the view
[16]:
world.run(steps=100, time_step=0.1)
await ui.update(world)
In a interative way, by iterating running and update, we could display a live simulation, which is what RealTimeSimulation does automatically for us.
[17]:
from navground.sim.real_time import RealTimeSimulation
[18]:
rt = RealTimeSimulation(world=world, time_step=0.1, factor=4.0,
web_ui=ui, bounds=((-2, -2), (2, 2)))
Multiple views are supported. Let’s add one here to avoid scrolling up.
[19]:
notebook_view(width=300, port=8002)
[19]:
[20]:
await rt.run(until=lambda: world.time > 60)
Finally, let’s color the agents by their efficacy (green=max, red=min efficacy) and run the simulation for one more minute:
[21]:
fill_map = linear_map(0.0, 1.0, cmap=cmx.RdYlGn)
def f(entity):
if isinstance(entity, sim.Agent):
return {'fill': fill_map(entity.behavior.efficacy)}
return {}
ui.decorate = f
[22]:
await rt.run(until=lambda: world.time > 120)
We can also display a video instead of a live simulation. You need to install cairosvg (to render SVGs) and moviepy (to generate the videos)
pip install cairosvg moviepy
[23]:
from navground.sim.ui.video import display_video
display_video(world, time_step=0.1, duration=30.0, factor=5.0,
bounds=((-2.5, -2.5), (2.5, 2.5)), decorate=f, display_width=300)
[23]:
or record a video to a file
[24]:
from navground.sim.ui.video import record_video
record_video("test.mp4", world, time_step=0.1, duration=30.0, factor=5.0,
bounds=((-2.5, -2.5), (2.5, 2.5)), decorate=f, width=600)
[25]:
from IPython.display import Video
Video("test.mp4", width=300)
[25]:
We can also first perform a run and then produce the video:
[26]:
world = sim.World()
scenario.init_world(world, seed=0)
run = sim.ExperimentalRun(world, steps=500, record_config=sim.RecordConfig.all(True))
run.run()
[27]:
from navground.sim.ui.video import display_video_from_run
display_video_from_run(run, factor=5.0, display_width=300)
[27]:
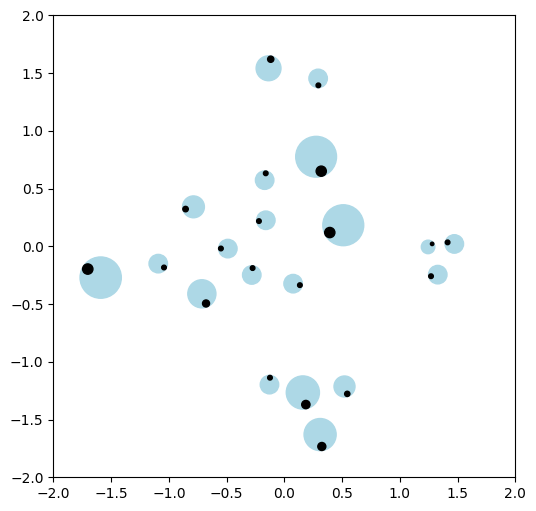
We can also use matplotlib to plot the world,
[28]:
from navground.sim.pyplot_helpers import plot_world, plot_run
from matplotlib import pyplot as plt
plt.figure(figsize=(6, 6))
ax = plt.subplot()
plot_world(ax, world=world, with_agents=True, color="lightblue",
velocity_arrow_width=0, in_box=True)
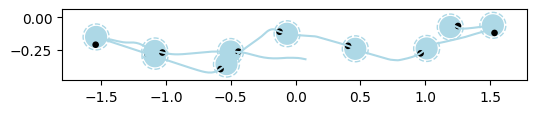
the trajectory done by one agent,
[29]:
plt.figure(figsize=(6, 6))
ax = plt.subplot()
plot_run(ax, run=run, agent_indices=[0], step=50, with_agent=True,
agent_kwargs = {'with_safety_margin': True}, color = lambda a: "lightblue")
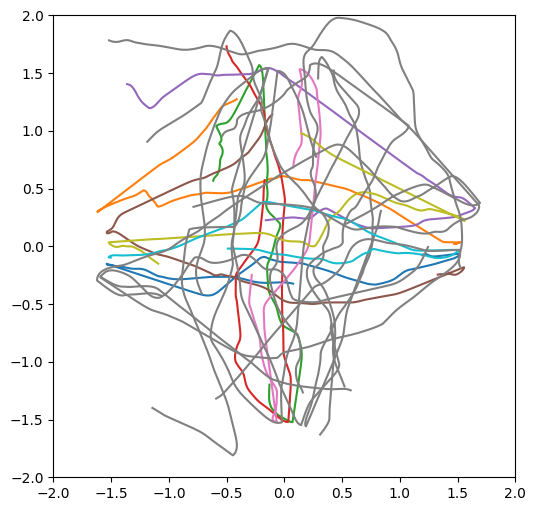
or by more agents
[30]:
from navground.sim.ui import svg_color
def color(agent):
if agent.type == 'agent':
return 'gray'
r = agent._uid % 10 / 10
svg_color(r , 1 - r, 0)
plt.figure(figsize=(6, 6))
ax = plt.subplot()
plot_run(ax, run=run, with_agent=False, color=color,
world_kwargs = {'in_box': True})