Sensors#
This notebook shows examples of sensors and navigation behaviors using them.
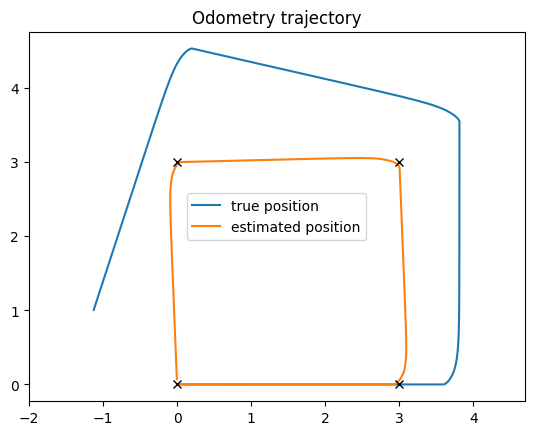
Odometry#
[1]:
from navground import core, sim
from navground.sim.ui.video import display_video_from_run, record_video_from_run
[6]:
import numpy as np
exp = sim.load_experiment("""
steps: 1000
time_step: 0.1
record_pose: true
scenario:
groups:
- type: thymio
color: darkcyan
number: 1
radius: 0.25
orientation: 0
speed_tolerance: 0.1
kinematics:
type: 2WDiff
max_speed: 1.0
wheel_axis: 0.5
behavior:
type: Dummy
optimal_speed: 0.5
task:
type: Waypoints
waypoints: [[3, 0], [3, 3], [0, 3], [0, 0]]
loop: false
tolerance: 0.1
state_estimation:
type: Odometry
angular_speed_bias: 0.1
angular_speed_std_dev: 0.2
longitudinal_speed_bias: -0.2
longitudinal_speed_std_dev: 0.2
transversal_speed_bias: 0
transversal_speed_std_dev: 0.05
update_ego_state: true
update_sensing_state: false
""")
class OdomProbe(sim.RecordProbe):
dtype = float
def update(self, run: sim.ExperimentalRun) -> None:
for agent in run.world.agents:
self.data.append(np.array(agent.behavior.position))
def get_shape(self, world: sim.World) -> list[int]:
return [len(world.agents), 2]
exp.add_record_probe("odom/poses", OdomProbe)
[7]:
run = exp.run_once(0)
[8]:
run.records
[8]:
{'odom/poses': <Dataset: shape (313, 1, 2), dtype float64>,
'poses': <Dataset: shape (313, 1, 3), dtype float64>}
[9]:
from matplotlib import pyplot as plt
from navground.sim.pyplot_helpers import plot_run
odom_poses = np.asarray(run.get_record("odom/poses"))
plt.plot(run.poses[:, 0, 0], run.poses[:, 0, 1], label="true position")
plt.plot(odom_poses[:, 0, 0], odom_poses[:, 0, 1], label="estimated position")
for p in run.world.agents[0].task.waypoints:
plt.plot(*p, 'kx')
plt.legend()
plt.title("Odometry trajectory")
plt.axis('equal');
[10]:
def render_trace(points: list[core.Vector2], color: str, width: float = 0.03, opacity: float = 0.5) -> str:
svg_point = " ".join([f"{x:.4f},{y:.4f}" for x, y in points])
return f'<polyline points="{svg_point}" fill="none" stroke="{color}" stroke-width="{width}" stroke-opacity="{opacity}"/>'
positions = run.poses[:, 0, :2]
odom_positions = np.asarray(run.get_record("odom/poses"))[:, 0, :2]
def render_traces(world: sim.World) -> str:
return "\n".join([
render_trace(positions[:world.step], color='black'),
render_trace(odom_positions[:world.step], color='orange')])
display_video_from_run(run, factor=3, width=1280, extras=[render_traces])
[10]:
[11]:
record_video_from_run("../components/state_estimations/odometry.mp4", run, factor=3, width=1280, extras=[render_traces])
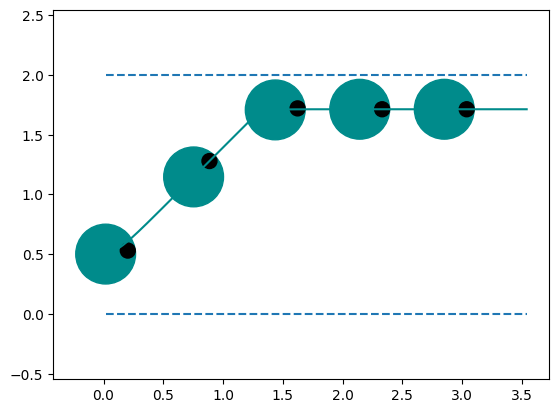
Boundary#
[12]:
import numpy as np
from navground import core, sim
class StayAwayFromBoundary(core.Behavior, name="StayAwayFromBoundary"):
def __init__(self, kinematics: core.Kinematics | None = None, radius: float = 0.0):
super().__init__(kinematics, radius)
self._state = core.SensingState()
def get_environment_state(self) -> core.EnvironmentState:
return self._state
def desired_velocity_towards_velocity(self, velocity: core. Vector2, time_step: float) -> core.Vector2:
d1, d2 = self._state.buffers['boundary_distance'].data
r = self.radius + self.safety_margin
if d1 < r or d2 < r:
velocity[1] = 0
return velocity
def desired_velocity_towards_point(self, point: core.Vector2, speed: float, time_step: float) -> core.Vector2:
delta = point - self.pose.position
distance = np.linalg.norm(delta)
if distance:
return self.desired_velocity_towards_velocity(
speed * delta / distance, time_step)
return np.zeros(2)
[13]:
exp = sim.load_experiment("""
steps: 200
time_step: 0.1
record_pose: true
scenario:
bounding_box:
min_y: 0
max_y: 2
min_x: -1
max_x: 5
groups:
- type: thymio
color: darkcyan
number: 1
radius: 0.25
control_period: 0.1
orientation: 0
position: [0, 0.5]
kinematics:
type: 2WDiff
max_speed: 1.0
wheel_axis: 0.5
behavior:
type: StayAwayFromBoundary
optimal_speed: 0.25
safety_margin: 0.1
task:
type: Direction
direction: [1, 1]
state_estimation:
type: Boundary
min_y: 0
max_y: 2
""")
[14]:
run = exp.run_once(0)
[15]:
from matplotlib import pyplot as plt
from navground.sim.pyplot_helpers import plot_run
ax = plt.subplot()
bb = run.world.bounding_box
ax.hlines([bb.min_y, bb.max_y], min(run.poses[..., 0]), max(run.poses[..., 0]), linestyle="dashed")
plot_run(ax, run=run, step=40, with_agent=True)
plt.axis('equal');
[16]:
run.world.bounding_box
[16]:
BoundingBox(min_x=-1.0, max_x=5.0, min_y=0.0, max_y=2.0)
[17]:
def render_boundary(world: sim.World) -> str:
s = ''
x1 = world.bounding_box.min_x
x2 = world.bounding_box.max_x
for y in (world.bounding_box.min_y, world.bounding_box.max_y):
s += f'<line x1="{x1}" y1="{y}" x2="{x2}" y2="{y}" stroke="blue" stroke-width="0.01" stroke-dasharray="0.1" />'
return s
[18]:
display_video_from_run(run, factor=3, width=1280, extras=[render_boundary])
[18]:
[213]:
record_video_from_run("../components/state_estimations/boundary.mp4", run, factor=3, width=1280, extras=[render_boundary])
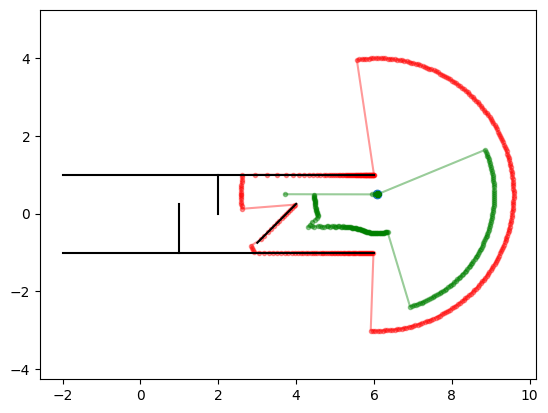
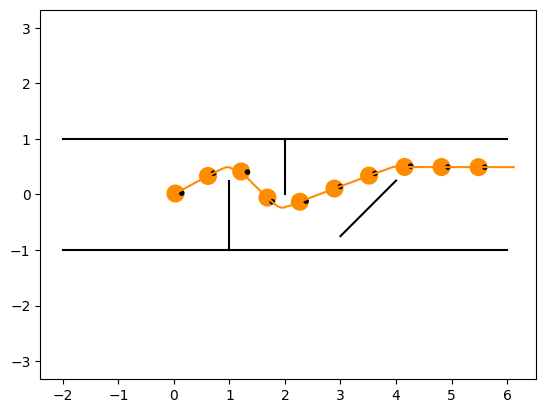
Lidar#
[19]:
import numpy as np
from navground import core, sim
import math
def distance_from_target(angle: float, free_range: float, horizon: float) -> float:
d = math.cos(angle) * horizon
if d < 0:
return horizon
if d < free_range:
return abs(math.sin(angle) * horizon)
return math.sqrt(horizon ** 2 + free_range ** 2 - 2 * free_range * d)
def dilate_ranges(ranges: np.ndarray, by: float, fov: float):
d_ranges = np.array(ranges)
for i, r in enumerate(ranges):
alpha = math.asin(min(by / r, 1))
di = math.ceil(alpha / fov * len(ranges))
i0 = max(i - di, 0)
d_ranges[i0: i + di] = np.minimum(max(0, r - by), d_ranges[i0: i + di])
return d_ranges
class BehaviorUsingLidar(core.Behavior, name="UsingLidar"):
def __init__(self, kinematics: core.Kinematics | None = None, radius: float = 0.0):
super().__init__(kinematics, radius)
self._state = core.SensingState()
self._eta = 0.5
@property
def eta(self) -> float:
return self._eta
def get_environment_state(self) -> core.EnvironmentState:
return self._state
def desired_velocity_towards_velocity(self, velocity: core. Vector2, time_step: float) -> core.Vector2:
speed = np.linalg.norm(velocity)
if speed:
p = self.position + velocity / speed * self.horizon
return self.desired_velocity_towards_point(p, speed, time_step)
return np.zeros(2)
def desired_velocity_towards_point(self, point: core.Vector2, speed: float, time_step: float) -> core.Vector2:
target_angle = core.orientation_of(point - self.position)
opt_angle = 0.0
opt_distance = self.horizon
opt_free_range = -1.0
ranges = self._state.buffers["range"].data
fov = float(self._state.buffers["fov"].data[0])
s = float(self._state.buffers["start_angle"].data[0]) + self.orientation
angles = np.linspace(s, s + fov, len(ranges))
ranges = dilate_ranges(ranges, self.radius + self.safety_margin, fov)
for angle, free_range in zip(angles, ranges):
theta = angle - target_angle
dist = distance_from_target(theta, free_range, self.horizon)
if dist < opt_distance:
opt_angle = angle
opt_free_range = free_range
opt_distance = dist
if opt_distance >= self.horizon:
return np.zeros(2)
desired_speed = min(speed, opt_free_range / self.eta)
return desired_speed * core.unit(opt_angle)
[20]:
exp = sim.load_experiment("""
steps: 200
time_step: 0.0333
record_pose: true
record_sensing:
- agent_indices: [0]
scenario:
walls:
- line: [[-2, -1], [6, -1]]
- line: [[-2, 1], [6, 1]]
- line: [[1, -1], [1, 0.25]]
- line: [[2, 0.0], [2, 1]]
- line: [[3, -0.75], [4, 0.25]]
groups:
- type: quadrotor
color: darkorange
number: 1
radius: 0.15
orientation: 0
kinematics:
type: Omni
max_speed: 1
max_angular_speed: 10.0
behavior:
type: UsingLidar
horizon: 5
safety_margin: 0.1
heading: velocity
rotation_tau: 0.25
task:
type: Direction
direction: [1, 0]
state_estimation:
type: Lidar
range: 3.5
start_angle: -3.14
field_of_view: 6.28
resolution: 360
""")
[22]:
from navground.sim.notebook import display_in_notebook
display_in_notebook(exp.scenario.make_world())
[22]:

[23]:
run = exp.run_once(0)
[24]:
run.get_records("sensing")
[24]:
{'0/fov': <Dataset: shape (200, 1), dtype float64>,
'0/range': <Dataset: shape (200, 360), dtype float64>,
'0/start_angle': <Dataset: shape (200, 1), dtype float64>}
[25]:
from matplotlib import pyplot as plt
from navground.sim.pyplot_helpers import plot_world
behavior = run.world.agents[0].behavior
state = behavior.environment_state
ranges = state.get_buffer('range').data
start = state.get_buffer('start_angle').data[0] + behavior.orientation
fov = state.get_buffer('fov').data[0]
angles = np.linspace(start, start + fov, len(ranges))
d_ranges = dilate_ranges(ranges, 0.5, fov)
ps = np.asarray([core.unit(angle) * r + behavior.position for angle, r in zip(angles, ranges)])
d_ps = np.asarray([core.unit(angle) * r + behavior.position for angle, r in zip(angles, d_ranges)])
c = behavior.position
ax = plt.subplot()
ax.plot(*c, 'o');
ax.plot(ps[:, 0], ps[:, 1], 'r.-', alpha=0.4)
ax.plot(d_ps[:, 0], d_ps[:, 1], 'g.-', alpha=0.4)
plot_world(ax, run.world)
plt.axis('equal');
[26]:
from matplotlib import pyplot as plt
from navground.sim.pyplot_helpers import plot_run
ax = plt.subplot()
plot_run(ax, run=run, step=20, with_agent=True)
plt.axis('equal');
[27]:
display_video_from_run(run, factor=1, width=1280)
[27]:
[28]:
def render_scan(pose: core.Pose2, ranges: np.ndarray, start_angle: float, fov: float, color: str) -> str:
a = start_angle + pose.orientation
angles = np.linspace(a, a + fov, len(ranges))
svg = ''
ps = [core.unit(angle) * r + pose.position for angle, r in zip(angles, ranges)]
points = " ".join([f"{x:.4f},{y:.4f}" for x, y in ps])
return f'<polyline points="{points}" fill="none" stroke="{color}" stroke-width="0.05" stroke-opacity="0.2"/>'
def render_scan_state(pose: core.Pose2, state: core.SensingState, color: str) -> str:
return render_scan(
pose, state.get_buffer('range').data,
state.get_buffer('start_angle').data[0],
state.get_buffer('fov').data[0], color)
def scan_renderer(*args, **kwargs) -> str:
def f(world: sim.World) -> str:
return "\n".join(
render_scan_state(agent.pose, agent.behavior.environment_state, *args, **kwargs)
for agent in world.agents)
return f
[29]:
display_video_from_run(run, factor=1, extras=[scan_renderer(color="red")], display_width=720, width=1280)
[29]:
[232]:
record_video_from_run("../components/state_estimations/lidar.mp4", run, factor=1,
width=1280, extras=[scan_renderer(color="red")])